higuys, at first please see below image:
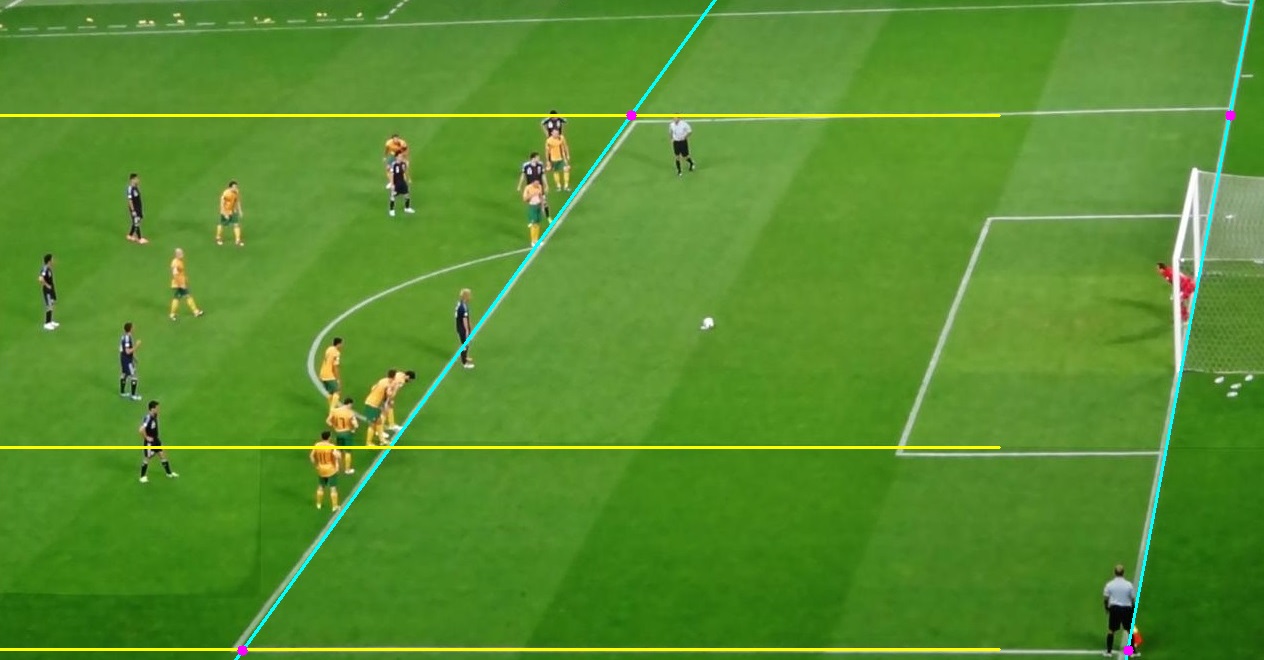
why lines that detected and drawn by houghline are not really parallel with white lines of football pitch ??
i need that intersection point be on really places on image precisely
then it need to draw stright parallel line with white lines in image who can helps me to solve this problem
thanks in advance
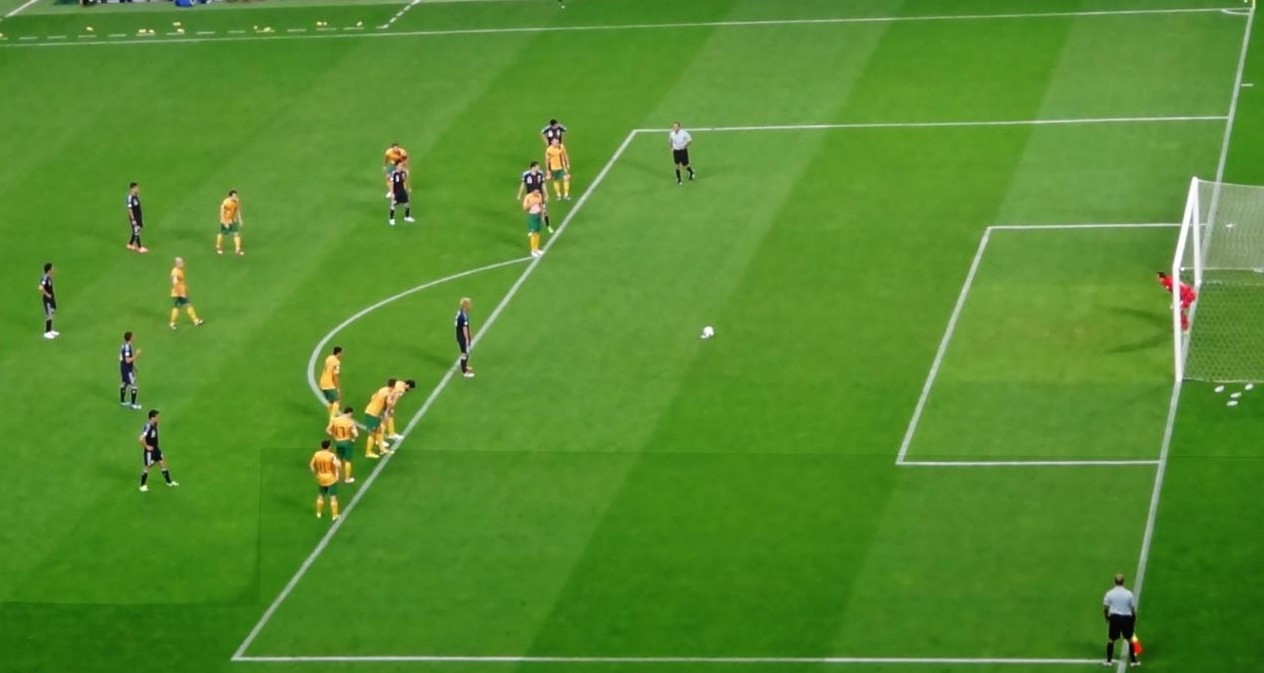
if you want to work with code ,this is original image d.jpg:
and this is my python code:
import numpy as np
import cv2
from collections import defaultdict
import sys
import math
img2 = cv2.imread("e:/d.jpg")
edges2 = cv2.Canny(img2, 40, 55)
def segment_by_angle_kmeans(lines, k=2, **kwargs):
# Define criteria = (type, max_iter, epsilon)
default_criteria_type = cv2.TERM_CRITERIA_EPS cv2.TERM_CRITERIA_MAX_ITER
criteria = kwargs.get('criteria', (default_criteria_type, 10, 1.0))
flags = kwargs.get('flags', cv2.KMEANS_RANDOM_CENTERS)
attempts = kwargs.get('attempts', 10)
# Get angles in [0, pi] radians
angles = np.array([line[0][1] for line in lines])
# Multiply the angles by two and find coordinates of that angle on the Unit Circle
pts = np.array([[np.cos(2*angle), np.sin(2*angle)] for angle in angles], dtype=np.float32)
# Run k-means
if sys.version_info[0] == 2:
# python 2.x
ret, labels, centers = cv2.kmeans(pts, k, criteria, attempts, flags)
else:
# python 3.x, syntax has changed.
labels, centers = cv2.kmeans(pts, k, None, criteria, attempts, flags)[1:]
labels = labels.reshape(-1) # Transpose to row vector
# Segment lines based on their label of 0 or 1
segmented = defaultdict(list)
for i, line in zip(range(len(lines)), lines):
segmented[labels[i]].append(line)
segmented = list(segmented.values())
print("Segmented lines into two groups: %d, %d" % (len(segmented[0]), len(segmented[1])))
return segmented
def intersection(line1, line2):
"""
Find the intersection of two lines
specified in Hesse normal form.
Returns closest integer pixel locations.
"""
rho1, theta1 = line1[0]
rho2, theta2 = line2[0]
A = np.array([[np.cos(theta1), np.sin(theta1)],
[np.cos(theta2), np.sin(theta2)]])
b = np.array([[rho1], [rho2]])
x0, y0 = np.linalg.solve(A, b)
x0, y0 = int(np.round(x0)), int(np.round(y0))
return [[x0, y0]]
def segmented_intersections(lines):
"""
Find the intersection between groups of lines.
"""
intersections = []
for i, group in enumerate(lines[:-1]):
for next_group in lines[i 1:]:
for line1 in group:
for line2 in next_group:
intersections.append(intersection(line1, line2))
return intersections
def drawLines(img, lines, color=(0,0,255)):
"""
Draw lines on an image
"""
for line in lines:
for rho,theta in line:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 1000*(-b))
y1 = int(y0 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img, (x1,y1), (x2,y2), color, 2)
# Detect lines
rho = 2.7
theta = np.pi/50
thresh = 410
lines = cv2.HoughLines(edges2, rho, theta, thresh)
print("Found lines: %d" % (len(lines)))
# Draw all Hough lines
img_with_all_lines = np.copy(2)
drawLines(img_with_all_lines, lines)
# Cluster line angles into 2 groups (vertical and horizontal)
segmented = segment_by_angle_kmeans(lines, 2)
# Find the intersections of each vertical line with each horizontal line
intersections = segmented_intersections(segmented)
img_with_segmented_lines = np.copy(img2)
# Draw vertical lines
vertical_lines = segmented[1]
img_with_vertical_lines = np.copy(img2)
drawLines(img_with_segmented_lines, vertical_lines, (255,255,0))
# Draw horizontal lines
horizontal_lines = segmented[0]
img_with_horizontal_lines = np.copy(img2)
drawLines(img_with_segmented_lines, horizontal_lines, (0,255,255))
# Draw intersection points
intersections.pop(5)
intersections.pop(4)
mn = intersections[3]
mk = intersections[2]
intersections = intersections[:2]
intersections.append(mn)
intersections.append(mk)
print(intersections)
for point in intersections:
pt = (point[0][0], point[0][1])
length = 5
cv2.circle(img_with_segmented_lines, pt, 5 , (255, 0, 255), -1)
cv2.imshow("Segmented lines", img_with_segmented_lines)
cv2.waitKey()
CodePudding user response:
Hough uses accumulators with a finite resolution and this resolution determines the accuracy. You can reduce your theta (at the expense of running time, and possibly loss of reliability).
If I had to do it, I would probably add some post-processing to detect the lines more precisely along the Hough lines, f.i. using a directional gradient filter and robust line fitting.