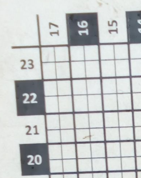
In the image below, I am using opencv harris corner detector to detect only the corners for the squares (and the smaller squares within the outer squares). However, I am also getting corners detected for the numbers on the side of the image. How do I get this to focus only on the squares and not the numbers? The code, input image and output image are below:
import cv2 as cv
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv.cornerHarris(gray, 2, 3, 0.04)
dst = cv.dilate(dst,None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255]
cv.imshow('dst', img)
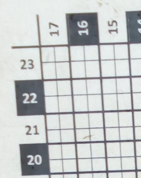
Input image
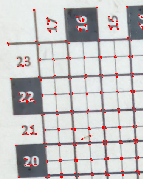
Output from Harris corner detector
CodePudding user response:
Here's a potential approach using traditional image processing:
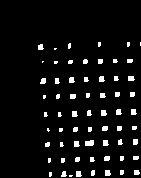
Obtain binary image. We
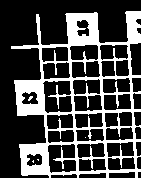
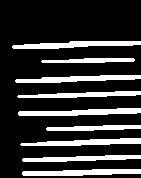
Detected horizontal lines
->horizontal mask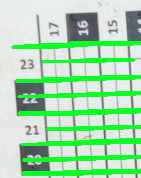
Detected vertical lines
->vertical mask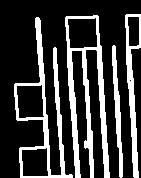
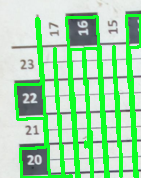
Bitwise-and both masks
->detected intersection points->corners->cleaned up corners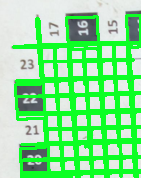
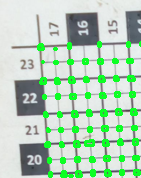
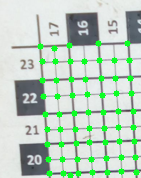
The results aren't perfect but it's pretty close. The problem comes from the noise on the vertical mask due to the slanted image. If the image was centered without an angle, the results would be ideal. You can probably fine tune the kernel sizes or iterations to get better results.
Code
import cv2 import numpy as np # Load image, create horizontal/vertical masks, Gaussian blur, Adaptive threshold image = cv2.imread('1.png') original = image.copy() horizontal_mask = np.zeros(image.shape, dtype=np.uint8) vertical_mask = np.zeros(image.shape, dtype=np.uint8) gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY) blur = cv2.GaussianBlur(gray, (3,3), 0) thresh = cv2.adaptiveThreshold(blur, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY_INV, 23, 7) # Remove small noise on thresholded image cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = cnts[0] if len(cnts) == 2 else cnts[1] for c in cnts: area = cv2.contourArea(c) if area < 150: cv2.drawContours(thresh, [c], -1, 0, -1) # Detect horizontal lines dilate_horizontal_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (10,1)) dilate_horizontal = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, dilate_horizontal_kernel, iterations=1) horizontal_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (40,1)) detected_lines = cv2.morphologyEx(dilate_horizontal, cv2.MORPH_OPEN, horizontal_kernel, iterations=1) cnts = cv2.findContours(detected_lines, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = cnts[0] if len(cnts) == 2 else cnts[1] for c in cnts: cv2.drawContours(image, [c], -1, (36,255,12), 2) cv2.drawContours(horizontal_mask, [c], -1, (255,255,255), 2) # Remove extra horizontal lines using contour area filtering horizontal_mask = cv2.cvtColor(horizontal_mask,cv2.COLOR_BGR2GRAY) cnts = cv2.findContours(horizontal_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = cnts[0] if len(cnts) == 2 else cnts[1] for c in cnts: area = cv2.contourArea(c) if area > 1000 or area < 100: cv2.drawContours(horizontal_mask, [c], -1, 0, -1) # Detect vertical dilate_vertical_kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (1,7)) dilate_vertical = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, dilate_vertical_kernel, iterations=1) vertical_kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (1,2)) detected_lines = cv2.morphologyEx(dilate_vertical, cv2.MORPH_OPEN, vertical_kernel, iterations=4) cnts = cv2.findContours(detected_lines, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = cnts[0] if len(cnts) == 2 else cnts[1] for c in cnts: cv2.drawContours(image, [c], -1, (36,255,12), 2) cv2.drawContours(vertical_mask, [c], -1, (255,255,255), 2) # Find intersection points vertical_mask = cv2.cvtColor(vertical_mask,cv2.COLOR_BGR2GRAY) combined = cv2.bitwise_and(horizontal_mask, vertical_mask) kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2,2)) combined = cv2.morphologyEx(combined, cv2.MORPH_OPEN, kernel, iterations=1) # Highlight corners cnts = cv2.findContours(combined, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = cnts[0] if len(cnts) == 2 else cnts[1] for c in cnts: # Find centroid and draw center point try: M = cv2.moments(c) cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00']) cv2.circle(original, (cx, cy), 3, (36,255,12), -1) except ZeroDivisionError: pass cv2.imshow('thresh', thresh) cv2.imshow('horizontal_mask', horizontal_mask) cv2.imshow('vertical_mask', vertical_mask) cv2.imshow('combined', combined) cv2.imshow('original', original) cv2.imshow('image', image) cv2.waitKey()