I am trying to replicate what I have on the example image using the opencv lines function. I have been able to draw the lines on the target image but the lines are broken,
I want to align the broken lines so that they can appears as the example image, please how can I achieve this.
Below is my output image with the broken lines.
Example image
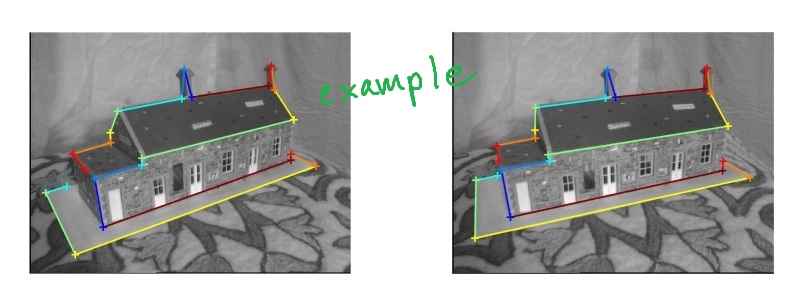
Output Image

My sample code.
results = hr['matchedPoints1'].values.tolist()
results2 = hr2['matchedPoints2'].values.tolist()
for i in zip(results, results2):
color = tuple(np.random.randint(0,255,3).tolist())
(x1, y1), (x2, y2) = i
print( (x1, y1), (x2, y2))
cv2.line(img1, (x1,y1), (x2,y2),(255,255,255), 2)
img1 = cv2.cvtColor(img1,cv2.COLOR_BGR2RGB)
plt.subplot(121),plt.imshow(img1)
plt.show()
Lines extracted from the two Matchedpoints below
(89, 368) (108, 343)
(39, 384) (57, 354)
(109, 532) (54, 492)
(685, 320) (711, 348)
(625, 292) (647, 308)
(625, 306) (646, 331)
(176, 466) (139, 442)
(156, 350) (118, 330)
(269, 318) (232, 308)
(269, 301) (229, 293)
(632, 209) (659, 225)
(587, 138) (617, 147)
(578, 80) (609, 86)
(571, 128) (601, 135)
(388, 155) (390, 155)
(370, 88) (371, 90)
(364, 159) (366, 158)
(211, 189) (199, 181)
(193, 240) (198, 234)
(194, 264) (199, 253)
(103, 292) (106, 271)
(135, 331) (112, 308)
Target images


Below is my cameraMatrices and MatchedPoints.
MatchedPoints1
89.6214953271028,368.64953271028
39.3785046728971,384.200934579439
109.957943925234,532.53738317757
685.359813084112,320.799065420561
625.546728971963,292.088785046729
625.546728971963,306.443925233645
176.948598130841,466.742990654206
156.61214953271,350.705607476636
269.060747663551,318.406542056075
269.060747663551,301.658878504673
632.724299065421,209.546728971963
587.266355140187,138.967289719626
578.892523364486,80.3504672897196
571.714953271028,128.200934579439
388.686915887851,155.714953271028
370.742990654206,88.7242990654206
364.761682242991,159.303738317757
211.640186915888,189.210280373832
193.696261682243,240.64953271028
194.892523364486,264.57476635514
103.976635514019,292.088785046729
135.079439252336,331.565420560748
MatchedPoint2
108.593312597201,343.442457231726
57.2340590979786,354.192068429238
54.8452566096425,492.742612752722
711.765940902022,348.220062208398
647.268273716952,308.804821150855
646.073872472784,331.498444790047
139.647744945568,442.577760497667
118.148522550545,330.304043545879
232.811041990669,308.804821150855
229.227838258165,293.277604976672
659.212286158632,225.196734059098
617.408242612753,147.56065318818
609.047433903577,86.6461897356141
601.88102643857,135.616640746501
390.47200622084,155.921461897356
371.361586314153,90.229393468118
366.583981337481,158.310264385692
199.367807153966,181.003888024883
198.173405909798,234.751944012442
199.367807153966,253.862363919129
106.204510108865,271.778382581648
112.176516329705,308.804821150855
CodePudding user response:
Each set of points are unique to the corresponding images.
I have shown how to obtain the visualizations for the first image using MatchedPoints1:
MatchedPoints1 = [(89.6214953271028,368.64953271028),
(39.3785046728971,384.200934579439),
(109.957943925234,532.53738317757),
(685.359813084112,320.799065420561),
(625.546728971963,292.088785046729),
(625.546728971963,306.443925233645),
(176.948598130841,466.742990654206),
(156.61214953271,350.705607476636),
(269.060747663551,318.406542056075),
(269.060747663551,301.658878504673),
(632.724299065421,209.546728971963),
(587.266355140187,138.967289719626),
(578.892523364486,80.3504672897196),
(571.714953271028,128.200934579439),
(388.686915887851,155.714953271028),
(370.742990654206,88.7242990654206),
(364.761682242991,159.303738317757),
(211.640186915888,189.210280373832),
(193.696261682243,240.64953271028),
(194.892523364486,264.57476635514),
(103.976635514019,292.088785046729),
(135.079439252336,331.565420560748)]
img = cv2.imread('house.png')
img2 = img.copy()
for e, i in enumerate(MatchedPoints1):
color = tuple(np.random.randint(0,255,3).tolist())
if (e < (len(MatchedPoints1) - 1)):
img2 = cv2.line(img2, (int(i[0]), int(i[1])), (int(MatchedPoints1[e 1][0]), int(MatchedPoints1[e 1][1])), color, 2)
img2 = cv2.circle(img2, (int(i[0]), int(i[1])), 5, color, -1)
Result:
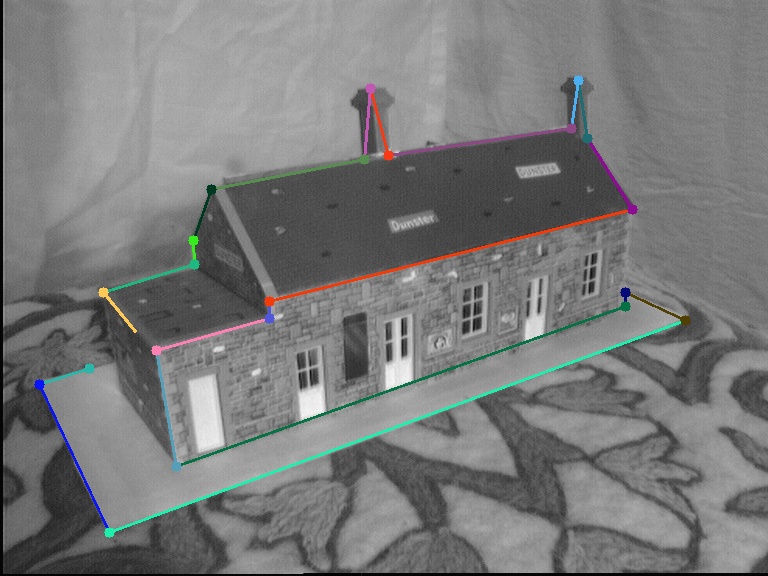
The same can be done for the second image using
MatchedPoints2.