In my code, I am currently loading an Entity using the .loadAsync(named: String) method, then adding to my existing AnchorEntity. As a test, I am then rotating my Entity 90°, and would like to determine how to then get the current angle of rotation.
The long-term intent is that I am going to allow users to rotate a model, but want to limit the rotation to a certain degree (I.E., the user can rotate the pitch of the model to 90° or -90°, but no further than that). Without being able to know the current angle of rotation for the Entity, I am unsure what logic I could use to limit this.
Entity.loadAsync(named: "myModel.usdz")
.receive(on: RunLoop.main)
.sink { completion in
// ...
} receiveValue: { [weak self] entity in
guard let self = self else { return }
self.objectAnchor.addChild(entity)
scene.addAnchor(objectAnchor)
let transform = Transform(pitch: .pi / 2,
yaw: .zero,
roll: .zero)
entity.setOrientation(transform.rotation,
relativeTo: nil)
print(entity.orientation)
// Sample Output: simd_quatf(real: 0.7071069,
// imag: SIMD3<Float>(0.7071067, 0.0, 0.0))
}
.store(in: &subscriptions)
I would have expected entity.orientation to give me something like 90.0 or 1.57 (.pi / 2), but unsure how I can get the current rotation of the Entity in a form that would align with expected angles.
CodePudding user response:
simd_quatf
In RealityKit 2.0, when retrieving simd_quatf structure's values from .orientation and .transform.rotation instance properties, the default initializer brings real (scalar) and imaginary (vector) parts of a 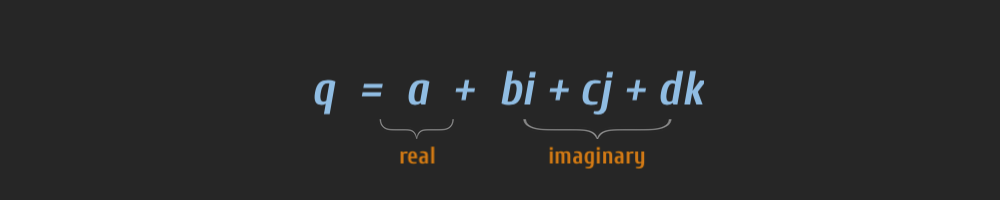
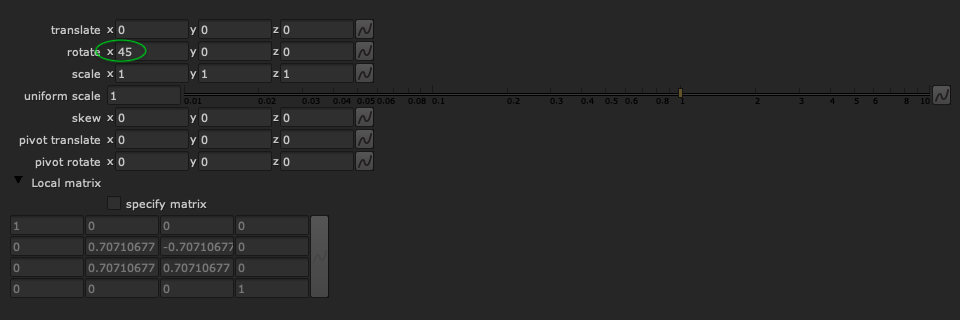
In your case, the value 0.707 corresponds to a rotation angle of 45 degrees. If you set both real (a) and imag.x (bi) to 0.707, you'll get a total rotation angle of 90 degrees for X axis.
It's easy to check:
let quaternion = simd_quatf(real: 0.707, imag: [0.707, 0, 0]) // 90 degrees
entity.orientation = quaternion
To check what "readable" model's orientation is, use regular parameters from another initializer:
public init(angle: Float, axis: SIMD3<Float>)
print(entity.orientation.angle) // 1.5707964
print(entity.orientation.axis) // SIMD3<Float>(0.99999994, 0.0, 0.0)