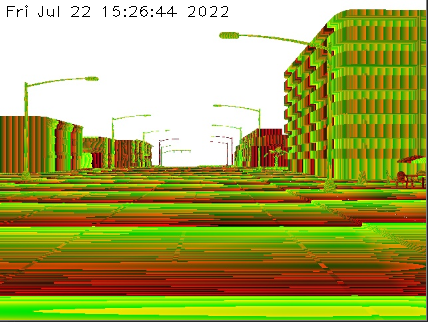
I am working with a simulation in Python equipped with a depth sensor. The visualization it's done in C . The sensor gives me the following image that I need to convert to gray.
For the conversion, I have the next formula:
normalized = (R G * 256 B * 256 * 256) / (256 * 256 * 256 - 1)
in_meters = 1000 * normalized
For converting the image to gray in C , I've written the following code:
cv::Mat ConvertRawToDepth(cv::Mat raw_image)
{
// raw_image.type() => CV_8UC3
// Extend raw image to 2 bytes per pixel
cv::Mat raw_extended = cv::Mat::Mat(raw_image.rows, raw_image.cols, CV_16UC3, raw_image.data);
// Split into channels
std::vector<cv::Mat> raw_ch(3);
cv::split(raw_image, raw_ch); // B, G, R
// Create and calculate 1 channel gray image of depth based on the formula
cv::Mat depth_gray = cv::Mat::zeros(raw_ch[0].rows, raw_ch[0].cols, CV_32FC1);
depth_gray = 1000.0 * (raw_ch[2] raw_ch[1] * 256 raw_ch[0] * 65536) / (16777215.0);
// Create final BGR image
cv::Mat depth_3d;
cv::cvtColor(depth_gray, depth_3d, cv::COLOR_GRAY2BGR);
return depth_3d;
}
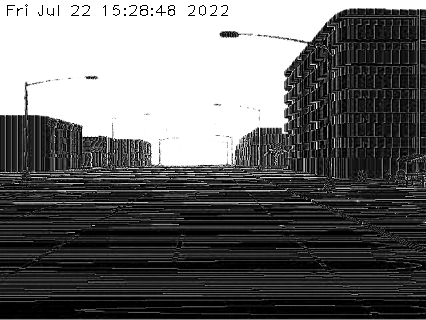
Achieving the next result:
If I do the conversion in python, I can simply write:
def convert_raw_to_depth(raw_image):
raw_image = raw_image[:, :, :3]
raw_image = raw_image.astype(np.float32)
# Apply (R G * 256 B * 256 * 256) / (256 * 256 * 256 - 1).
depth = np.dot(raw_image, [65536.0, 256.0, 1.0])
depth /= 16777215.0 # (256.0 * 256.0 * 256.0 - 1.0)
depth *= 1000
return depth
Achieving the next result:
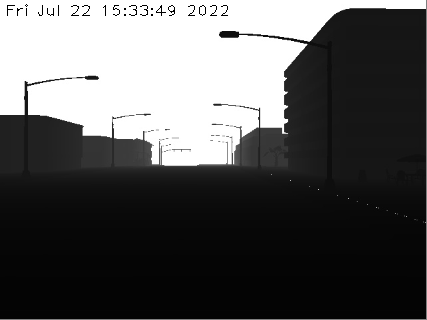
It's clear that in python it's done better, but the formula is the same, the image is the same, then why is it a difference and how can I rewrite the code in C to give me similar results as in Python?
CodePudding user response:
It looks like you are dealing with np.float32 array in Python while CV_8UC3 array in C .
Try converting to CV_32FC3 before calculation.
// Convert to float and split into channels
cv::Mat raw_image_float;
raw_image.convertTo(raw_image_float, CV_32FC3);
std::vector<cv::Mat> raw_ch(3);
cv::split(raw_image_float, raw_ch); // B, G, R