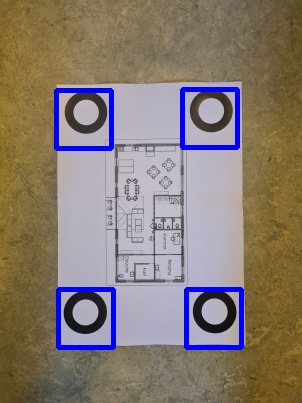
I try to recognize 4 the same fiducial marks on a map. With help of the internet, I have created something, but I am looking for ways to improve the search, since the result is far from perfect.
What I tried so far:
- Changing the threshold
- Trying different cv2 methods
- Making the image and the template smaller
This is my code:
import cv2
import numpy as np
from imutils.object_detection import non_max_suppression
# Reading and resizing the image
big_image = cv2.imread('20221028_093830.jpg')
scale_percent = 10 # percent of original size
width = int(big_image.shape[1] * scale_percent / 100)
height = int(big_image.shape[0] * scale_percent / 100)
dim = (width, height)
img = cv2.resize(big_image, dim, interpolation = cv2.INTER_AREA)
temp = cv2.imread('try_fiduc.png')
# save the image dimensions
W, H = temp.shape[:2]
# Converting them to grayscale
img_gray = cv2.cvtColor(img,
cv2.COLOR_BGR2GRAY)
temp_gray = cv2.cvtColor(temp,
cv2.COLOR_BGR2GRAY)
# Blur the image
img_blurred = cv2.GaussianBlur(img_gray, (7, 7), 0)
# Increasing contrast
img_contrast = img_blurred*3
# Passing the image to matchTemplate method
match = cv2.matchTemplate(
image=img_contrast, templ=temp_gray,
method=cv2.TM_CCOEFF)\
# Define a minimum threshold
thresh = 6000000
# Select rectangles with confidence greater than threshold
(y_points, x_points) = np.where(match >= thresh)
# initialize our list of rectangles
boxes = list()
# loop over the starting (x, y)-coordinates again
for (x, y) in zip(x_points, y_points):
# update our list of rectangles
boxes.append((x, y, x W, y H))
# apply non-maxima suppression to the rectangles
# this will create a single bounding box
boxes = non_max_suppression(np.array(boxes))
# loop over the final bounding boxes
for (x1, y1, x2, y2) in boxes:
# draw the bounding box on the image
cv2.rectangle(img, (x1, y1), (x2, y2),
(255, 0, 0), 3)
# Show the template and the final output
cv2.imshow("Template", temp_gray)
cv2.imshow("Image", img_contrast)
cv2.imshow("After NMS", img)
cv2.waitKey(0)
# destroy all the windows manually to be on the safe side
cv2.destroyAllWindows()
This is my template:

This is my image:
What are more ways to improve the template matching? In the end I want to be able to recognize them from further distance, and not have the false match. Any help would be appreciated.
CodePudding user response:
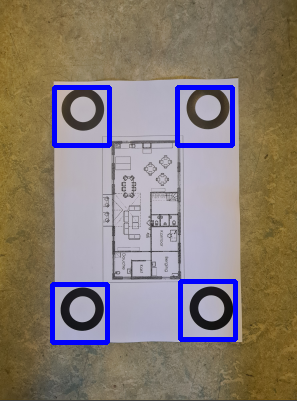
Here is how I would do that in Python/OpenCV. Mostly the same as yours with several changes.
First, I would not bother computing the dim for resize. I would just use your scale_percent/100 so a fraction. Resize permits that in place of the size.
Second, I would threshold your images and invert the template so that you are matching black rings in both the image and template.
Third, I would use TM_SQDIFF and find values below a threshold.
import cv2
import numpy as np
from imutils.object_detection import non_max_suppression
# Reading and resizing the image
big_image = cv2.imread('diagram.jpg')
scale_percent = 10 # percent of original size
scale = scale_percent/100
img = cv2.resize(big_image, (0,0), fx=scale, fy=scale, interpolation = cv2.INTER_AREA)
temp = cv2.imread('ring.png')
# save the image dimensions
W, H = temp.shape[:2]
# Converting them to grayscale
img_gray = cv2.cvtColor(img,
cv2.COLOR_BGR2GRAY)
temp_gray = cv2.cvtColor(temp,
cv2.COLOR_BGR2GRAY)
# threshold (and invert template)
img_thresh = cv2.threshold(img_gray, 0, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)[1]
temp_thresh = cv2.threshold(temp_gray, 0, 255, cv2.THRESH_BINARY_INV cv2.THRESH_OTSU)[1]
# Passing the image to matchTemplate method
match = cv2.matchTemplate(
image=img_thresh, templ=temp_thresh,
method=cv2.TM_SQDIFF)\
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(match)
print(min_val, max_val)
# Define a threshold
# thresh between 40000000 and 60000000 works
thresh = 50000000
# Select rectangles with confidence less than threshold for TM_SQDIFF
(y_points, x_points) = np.where(match <= thresh)
# initialize our list of rectangles
boxes = list()
# loop over the starting (x, y)-coordinates again
for (x, y) in zip(x_points, y_points):
# update our list of rectangles
boxes.append((x, y, x W, y H))
# apply non-maxima suppression to the rectangles
# this will create a single bounding box
boxes = non_max_suppression(np.array(boxes))
# loop over the final bounding boxes
result = img.copy()
for (x1, y1, x2, y2) in boxes:
# draw the bounding box on the image
cv2.rectangle(result, (x1, y1), (x2, y2),
(255, 0, 0), 3)
# save result
cv2.imwrite('diagram_match_locations.jpg', result)
# Show the template and the final output
cv2.imshow("Template_thresh", temp_thresh)
cv2.imshow("Image_thresh", img_thresh)
cv2.imshow("After NMS", result)
cv2.waitKey(0)
# destroy all the windows manually to be on the safe side
cv2.destroyAllWindows()
Result: