I'm currently using this pathfinding algorithm 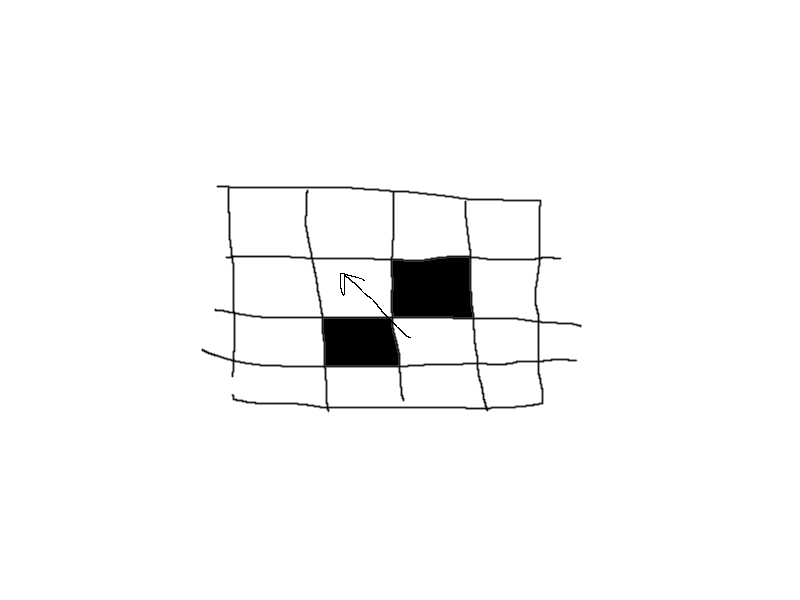
In this case, this path should be considered obstructed, however normal diagonal movement along obstacles, or out in an open area should still be allowed.
There's a field "mDiagonals" which when enabled, changes the "mDirection" checks from four-way to eight-way. I've tried toying around with those, but to no success.
Here is a detailed explanation of how the code works, by the author himself
Worse comes to worst, I'll end up writing my own A*, but the current implementation is so crazy optimized and easy to use I'd be sad having to do that. If anyone was able to show me how to modify the existing code, I'd be eternally grateful.
CodePudding user response:
It looks like if after the following lines:
if (mGrid[mNewLocationX, mNewLocationY] == 0)
continue;
you add
if (i > 3 && mGrid[mLocationX, mNewLocationY] == 0 && mGrid[mNewLocationX, mLocationY] == 0)
continue;
should be all you need. It just checks the cell in the new row and old column, and then the cell in the old row and new column, which are the two cells that block on the diagonal, and doesn't evaluate the cell if they are both blocked.