I have a machine in stationary mode. When it begins to run, its frequency changes linearly (from 0 to fully operational frequency), then becomes constant and finally begins to decrease linearly (from fully operational frequency to 0).
I wrote the following code for this:
te = 300; % seconds - time to get fully operative
% (to arrive from 0 to fully operational frequency)
% and to stop (from fully operational to 0)
me = 10; % eccentric mass
e = 0.5; % eccentricity of the eccentric mass
omega=0.2; % fully operational force frequency
% i need three time vectors
tt0=[0:0.1:te]; % uphill frequency part (from 0 to fully operational frequency)
tt1=[te 0.1:0.1:1.5*te]; % permanent fully operational frequency part
tt2=[1.5*te 0.1:0.1:2.5*te]; % downward frequency part (from fully operational frequency to 0)
tt_1=[tt0,tt1,tt2]; % whole time vector
n7=numel(tt_1);
n5=numel(tt0);
n6=numel(tt1);
n8=numel(tt2);
% create a 3 force frequency vectors
delta_omega1=omega/(n5-1);
delta_omega2=omega/(n8-1);
omega000=[0:delta_omega1:omega]; % from 0 to fully operational frequency
omega001=omega*ones(1,n6); % permanent fully operational frequency part
omega002=[omega:-delta_omega2:0]; % from fully operational frequency to 0
omega00=[omega000,omega001,omega002]; % whole force frequency vector
p00=zeros(n7,1);
p_0010=zeros(n5,1);
p_0011=zeros(n6,1);
p_0012=zeros(n8,1);
p_001=zeros(n7,1);
% force amplitude calculation
for j=1:n7
p00(j,1) = (me*e*omega00(j)^2);
end
% then i create 3 sin force vectors (for 3 different force frequency laws)
for j=1:n5
p_0010(j,1) = p00(j,1)*sin(omega/(2*te)*(tt0(j))^2);
end
for j=1:n6
p_0011(j,1) = p00(j n5,1)*sin(omega*te omega*(tt1(j)-te));
end
for j=1:n8
t2=tt2(1);
p_0012(j,1) = p00(j n6 n5,1)*sin((-1/2*omega*te omega*tt2(j)-...
1/2*omega/te*((t2-te)^2 (tt2(j)-t2)^2)));
end
p_001=[p_0010;p_0011;p_0012]; % whole force vector
figure (1)
plot (tt_1,omega00)
xlabel('time')
ylabel('force frequency')
grid on;
hold on
figure (2)
plot (tt_1,p_001)
xlabel('time')
ylabel('applied force')
grid on;
hold on
Which results in
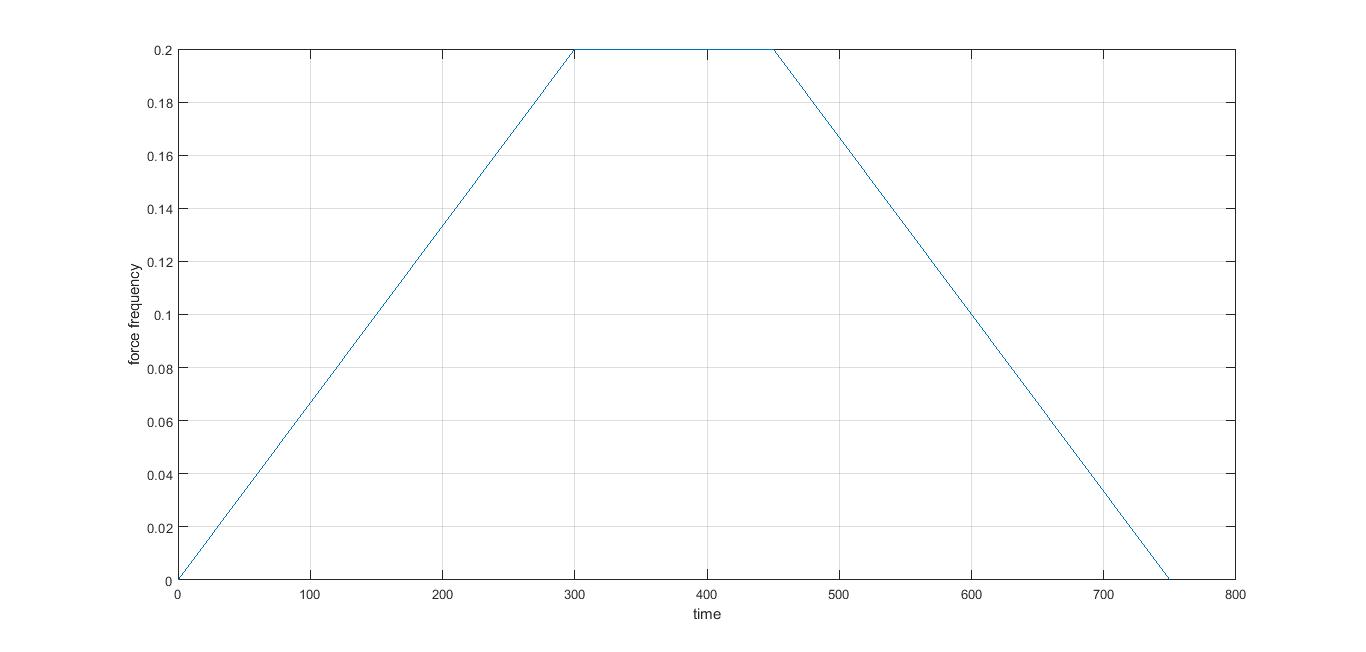
This is correct.
But force diagram:
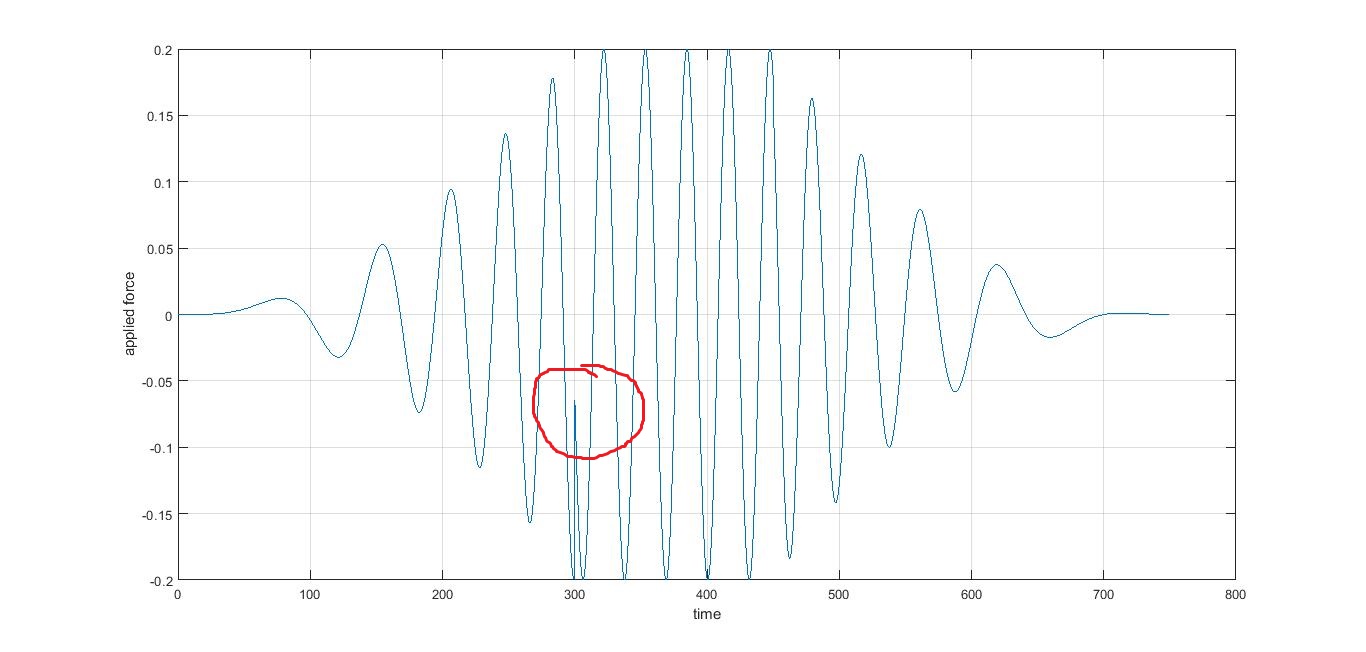
is incorrect.
How can I solve this problem? I don't need any discontinuity on the force diagram (because it produce a strange behavior of my system, like "parasite resonance" in this singular point).
CodePudding user response:
Your expression for the force is wrong.
For unbalance force, its expression is me*omega^2*sin(omega*t) only if rotational speed omega is constant. If rotational speed is not constant (as is the case where it is linearly increasing or decreasing), its full expression is
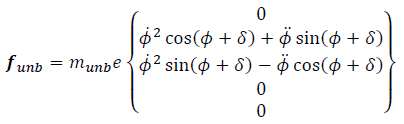
For a rotary machine, you should have unbalance forces on the horizontal and vertical direction (second and third terms on the force vector above). δ is the phase angle, ϕ_dot is the rotational speed and ϕ_ddot is rotational acceleration. Notice that for linearly increasing or decreasing rotational speed, ϕ_ddot = α = constant, so your force expression should contain a term
α*cos(phi)
for constant acceleration, the angular position is just as you defined. Just define properly the initial angular position phi_0 for each time interval (they are not zero, they are the last position for the previous time interval).