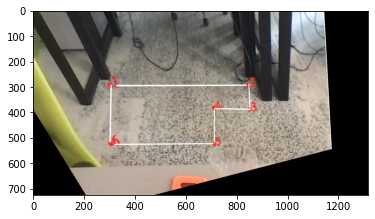
I have an array of coordinates that mark an area on the floor.
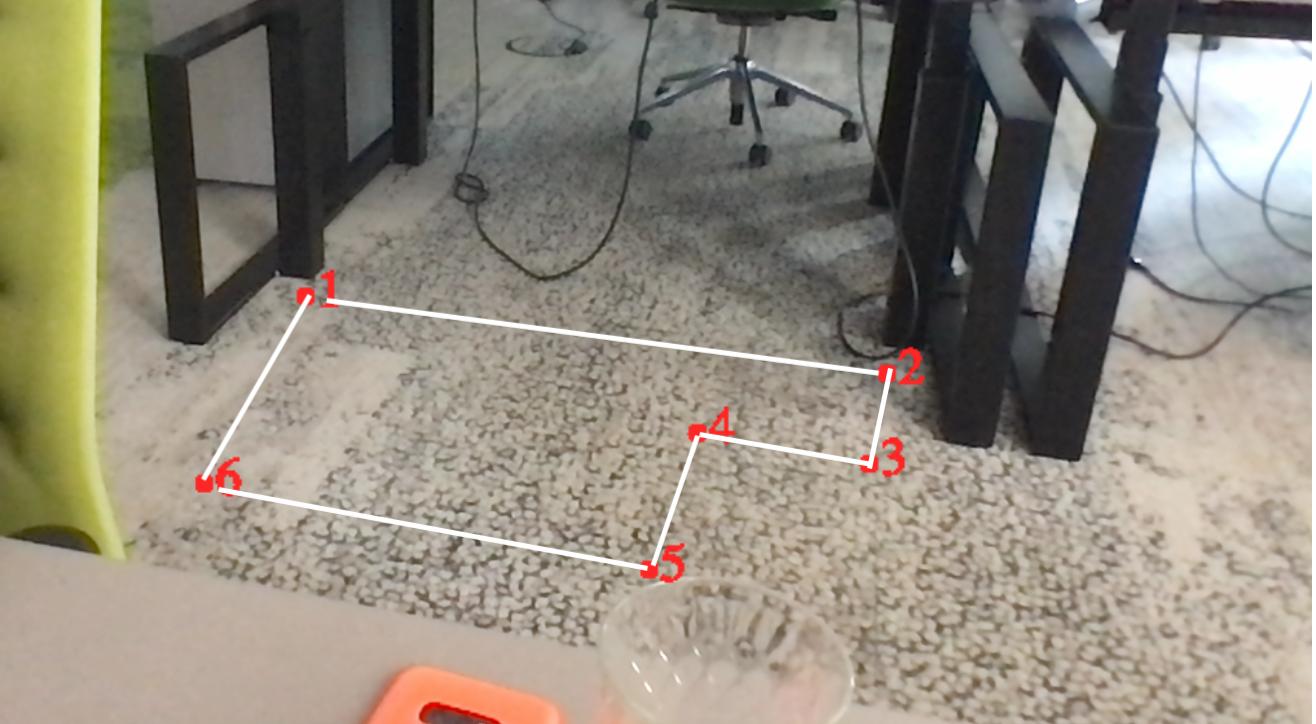
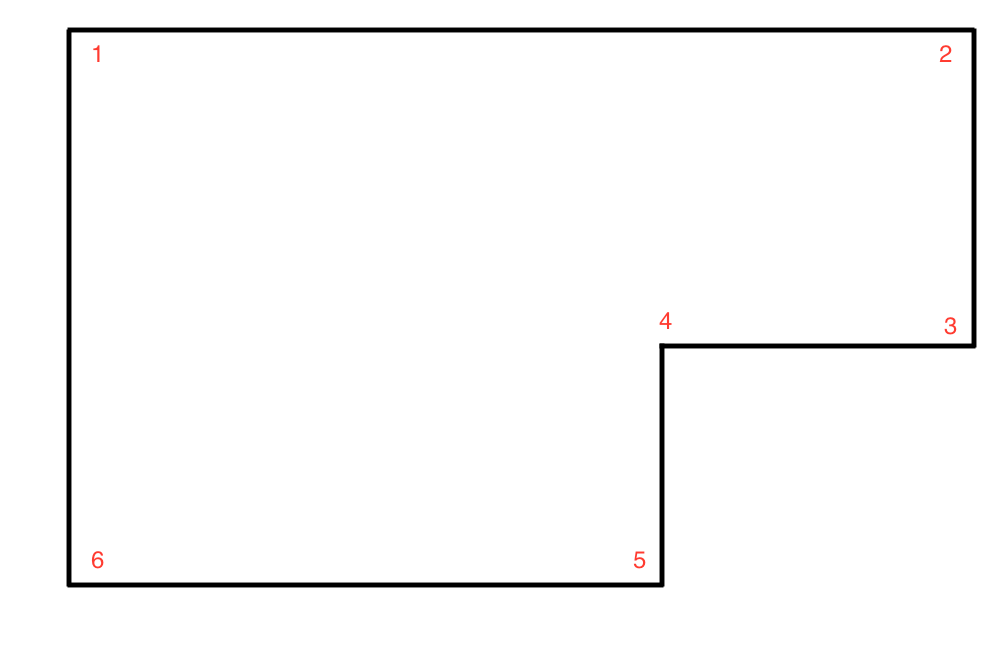
I want to generate a new array where all the coordinates are transformed, so that I get a warped array. The points should look like the following image. Please note that I want to generate the graphic using the new array. It does not exist yet. It gets generated after having to new array.
I know the distance between all coordinates if it helps. The coordinates json looks like this, where distance_to_next contains the distance to the next point in cm:
[
{
"x": 295,
"y": 228,
"distance_to_next": 200
},
{
"x": 559,
"y": 263,
"distance_to_next": 30
},
{
"x": 551,
"y": 304,
"distance_to_next": 50
},
{
"x": 473,
"y": 290,
"distance_to_next": 70
},
{
"x": 451,
"y": 352,
"distance_to_next": 150
},
{
"x": 249,
"y": 313,
"distance_to_next": 100
}
]
The first point is always in the top left.
I'm using python and opencv2 and I know about various functions like cv.warpAffine,
cv.warpPerspective, cv.findHomography, cv.perspectiveTransform, etc, but I'm not sure which one to use here.
Can someone point me in the right direction? Am I missing something obvious?
CodePudding user response:
The points in your coordinates json do not align with the white polygon. If I use them I get the green polygon as shown below:
import cv2
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# Load the image
img = cv2.imread('./input.jpg')
# Create a copy of the image
img_copy = np.copy(img)
img_copy = cv2.cvtColor(img_copy,cv2.COLOR_BGR2RGB)
pts = np.array([[295,228],[559,263],[551,304],[473,290],[451,352],[249,313]], np.int32)
pts = pts.reshape((-1,1,2))
img_copy2 = cv2.polylines(img_copy,[pts],True,(0,255,0), thickness=3)
plt.imshow(img_copy2)
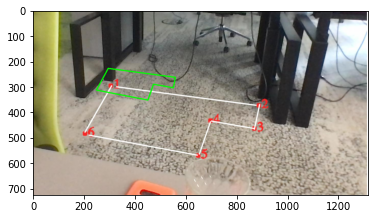
So I manually found the approx coordinates of your white polygon and overlayed them on white polygon in green. And you need the coordinates of desired polygon. I displayed them in red.
img = cv2.imread('./input.jpg')
img_copy = np.copy(img)
img_copy = cv2.cvtColor(img_copy,cv2.COLOR_BGR2RGB)
input_pts = np.array([[300,300],[890,380],[830,600],[200,480]], np.int32)
pts = input_pts.reshape((-1,1,2))
img_copy3 = cv2.polylines(img_copy,[pts],True,(0,255,0), thickness=3)
output_pts= np.array([[300,300],[850,300],[850,520],[300,520]], np.int32)
pts = output_pts.reshape((-1,1,2))
img_copy3 = cv2.polylines(img_copy3,[pts],True,(255,0,0), thickness=3)
plt.imshow(img_copy3)
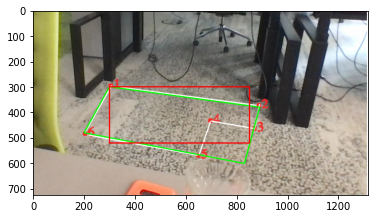
We need to use cv2.getPerspectiveTransform here. But it takes only 4 points as input, so discard 2 points.
img = cv2.imread('./input.jpg')
img_copy = np.copy(img)
img_copy = cv2.cvtColor(img_copy,cv2.COLOR_BGR2RGB)
input_pts = np.float32(input_pts)
output_pts = np.float32(output_pts)
# Compute the perspective transform M
M = cv2.getPerspectiveTransform(input_pts,output_pts)
# Apply the perspective transformation to the image
out = cv2.warpPerspective(img_copy,M,(img_copy.shape[1], img_copy.shape[0]),flags=cv2.INTER_LINEAR)
# Display the transformed image
plt.imshow(out)