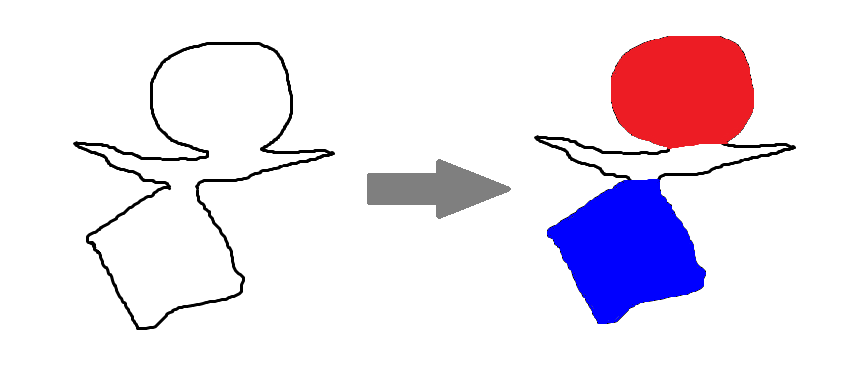
How can we transform the left diagram to the right diagram as per the reference image?
CodePudding user response:
Here's an idea:
- Load image, convert to grayscale, and Otsu's threshold for a binary image
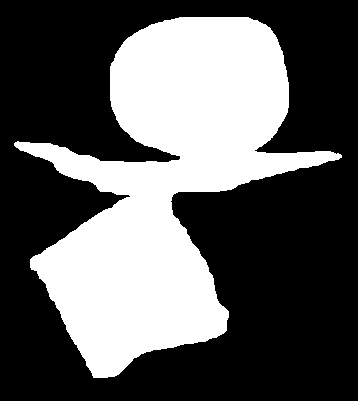
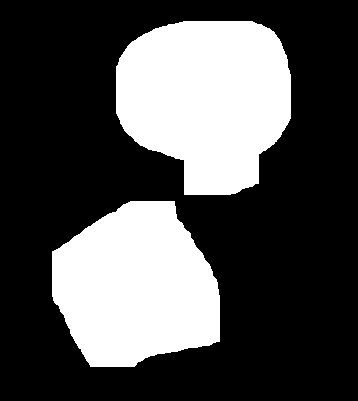
- Find the contour and fill it in with white
- Now that we have a binary image, we can perform morphological operations. Depending on the object that you're trying to extract, we can create different structing kernels. For the rectangle we can use
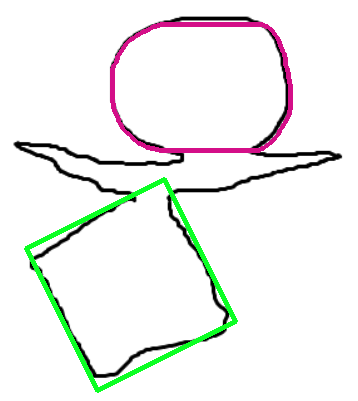
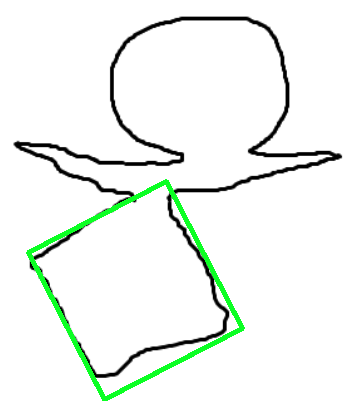
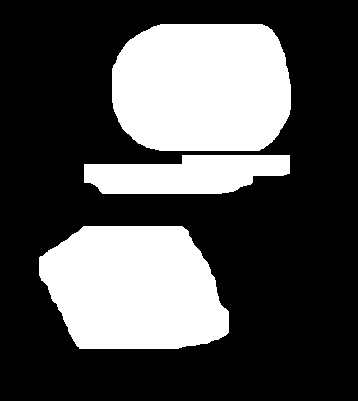
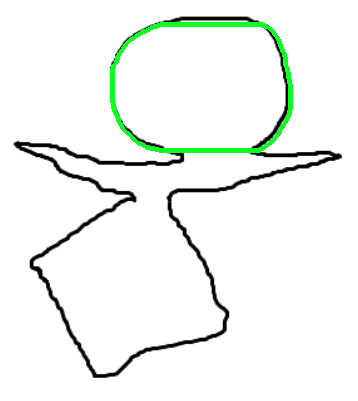
cv2.MORPH_RECT, for the ellipse we can remove the horizontal section with a larger kernel size and usecv2.MORPH_ELLIPSE. - We then filter for the remaining contours and find a rotated bounding box for the rectangle and ellipse
Here's a visualization of the process
For the ellipse
Since you didn't specify a language, here's an implementation with Python
import cv2
import numpy as np
# Load image, convert to grayscale, Otsu's threshold for binary image
image = cv2.imread('1.png')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV cv2.THRESH_OTSU)[1]
# Find contours and fill in contour with white
cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
cv2.drawContours(thresh, [c], 0, 255, -1)
# Rectangle ----------------------------------------
# Morph open to separate rectangular contour
rectangular_kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (20, 20))
rect = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, rectangular_kernel, iterations=4)
# Find contours and draw rotated rectangle onto image
cnts = cv2.findContours(rect, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
isolated_rect = cv2.minAreaRect(cnts[0])
box = np.int0(cv2.boxPoints(isolated_rect))
cv2.drawContours(image, [box], 0, (36,255,12), 3)
# Rectangle ----------------------------------------
# Ellipse ----------------------------------------
# Morph open to separate elliptical contour
horizontal_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (50,10))
ellipse = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, horizontal_kernel, iterations=2)
# Find contours and filter for ellipse
cnts = cv2.findContours(ellipse, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
# Filter using contour area, could also use Aspect Ratio or contour approximation
for c in cnts:
area = cv2.contourArea(c)
if area > 20000:
cv2.drawContours(image, [c], 0, (136,15,212), 3)
# Ellipse ----------------------------------------
# Display
cv2.imshow('image', image)
cv2.imshow('thresh', thresh)
cv2.imshow('rect', rect)
cv2.imshow('ellipse', ellipse)
cv2.waitKey()
CodePudding user response:
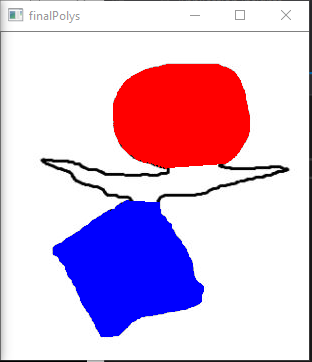
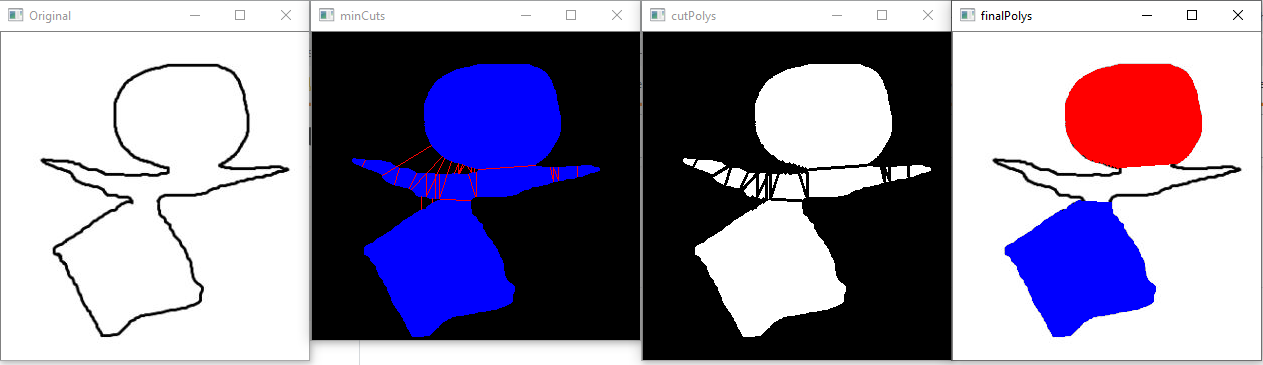
Using a gradient decent of point pairings (minimizing distance), you can get a numerical min cut list. Applying those min cuts to the original object allows it to be segmented into separate objects. The only parameter that you need to set is minObjectRadius which specifies the minimum radius of a shape that you care about (it is used to determine limits of min cut and for final shape filtration).
Additional processing images:
Code:
#include <stdio.h>
#include <opencv2/opencv.hpp>
#include <Windows.h>
#include <string>
using namespace std;
using namespace cv;
vector<tuple<int, int>> generatePointPairs(int totalIndicies, int stride = 1)
{
vector<tuple<int, int>> pointPairs;
for (int i = 0; i < totalIndicies; i =stride)
{
for (int ii = 0; ii < totalIndicies; ii =stride)
{
tuple<int, int> pair(i, ii);
pointPairs.push_back(pair);
}
}
return pointPairs;
}
double distSq(Point p1, Point p2)
{
return pow(p1.x - p2.x, 2) pow(p1.y - p2.y,2);
}
tuple<int, int> gradDecentPair(vector<Point> contour, tuple<int, int> pair)
{
int index0 = get<0>(pair);
int index1 = get<1>(pair);
bool flip = false;
double lastDist = distSq(contour[get<0>(pair)], contour[get<1>(pair)]);
int flipCounter = 0;
while (true)
{
bool improvementFound = false;
int staticIndex = index1;
if (flip) { staticIndex = index0; }
double bestDist = -1;
int bestIndex = -1;
for (int i = -5; i <= 5; i =1)
{
if (i == 0) { continue; }
int testIndex = index0 i;
if (flip) { testIndex = index1 i; }
if (testIndex < 0)
{ testIndex = contour.size(); }
else if (testIndex >= contour.size())
{ testIndex -= contour.size(); }
double testDist = distSq(contour[staticIndex], contour[testIndex]);
if (bestDist == -1 || testDist < bestDist)
{
bestIndex = testIndex;
bestDist = testDist;
}
}
if (bestDist < lastDist)
{
if (flip) { index1 = bestIndex; }
else { index0 = bestIndex; }
lastDist = bestDist;
improvementFound = true;
}
if (index0 == index1) { break; }
if (improvementFound) { continue; }
else
{
flipCounter ;
flip = !flip;
if (flipCounter > 10) { break; } //pretty sure this can be better, but lazy atm
}
}
return tuple<int, int>(index0, index1);
}
int main(int argc, char** argv)
{
int minObjectRadius = 75;
std::string fileName = "C:/Local Software/voyDICOM/resources/images/ShapeBlob.JPG";
Mat original = imread(fileName, cv::IMREAD_GRAYSCALE);
imshow("Original", original);
Mat bwImg;
cv::threshold(original, bwImg, 0, 255, cv::THRESH_OTSU);
bitwise_not(bwImg, bwImg);
vector<vector<Point> > contours;
findContours(bwImg, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
Mat minCuts(original.cols, original.rows, CV_8UC3);
fillPoly(minCuts, contours, Scalar(255,0,0));
vector<Point> cuts;
for (int i = 0; i < contours.size(); i )
{
std::cout << contours[i].size() << std::endl;
vector<tuple<int, int>> pointPairs = generatePointPairs(contours[i].size(), 25);
for (int ii = 0; ii < pointPairs.size(); ii )
{
tuple<int, int> minCut = gradDecentPair(contours[i], pointPairs[ii]);
Point p1 = contours[i][get<0>(minCut)];
Point p2 = contours[i][get<1>(minCut)];
double tempDist = distSq(p1, p2);
if (tempDist > 0 && tempDist <= pow(minObjectRadius, 2))
{
line(minCuts, contours[i][get<0>(minCut)], contours[i][get<1>(minCut)], Scalar(0, 0, 255));
cuts.push_back(p1);
cuts.push_back(p2);
}
}
std::cout << i << " , " << contours.size() << std::endl;
}
imshow("minCuts", minCuts);
fillPoly(bwImg, contours, 255);
for (int i = 0; i < cuts.size(); i = 2)
{
line(bwImg, cuts[i],cuts[i 1], 0,2);
}
imshow("cutPolys", bwImg);
Mat finalShapes = imread(fileName, cv::IMREAD_COLOR);
int colorIndex = 0;
vector<Scalar> colors = { Scalar(255,0,0),Scalar(0,0,255),Scalar(0,0,0) };
vector<vector<Point> > contoursFinal;
findContours(bwImg, contoursFinal, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for (int i = 0; i < contoursFinal.size(); i )
{
double tempArea = contourArea(contoursFinal[i]);
if (tempArea < pow(minObjectRadius, 2)) { continue; }
vector<vector<Point>> singleContour;
singleContour.push_back(contoursFinal[i]);
fillPoly(finalShapes, singleContour, colors[colorIndex]);
colorIndex ;
if (colorIndex >= colors.size()) { colorIndex = 0; }
}
imshow("finalPolys", finalShapes);
waitKey(0);
}