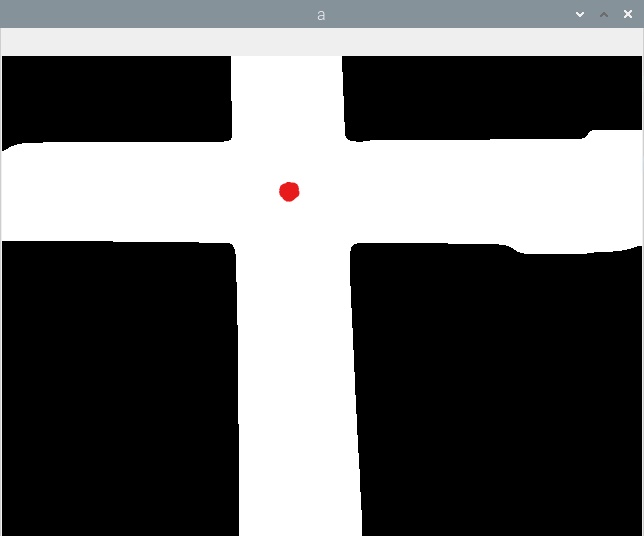
I want to detect the center of a cross. But since the two rectangles are connected, I don't know how to find it. I have these images for example:
Cross 1
Cross 2
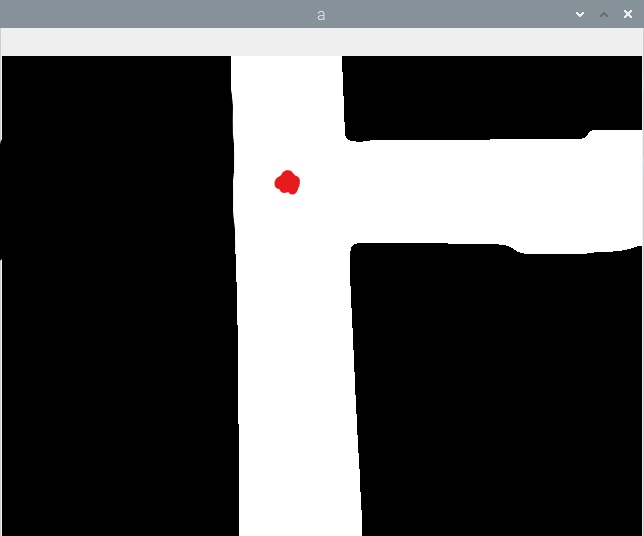
I would like to find the "red dot".
CodePudding user response:
Here's a possible solution. It is based on my answer here: How can i get the inner contour points without redundancy in OpenCV - Python. The main idea is to convolve the image with a special kernel that identifies intersections. After this operation, you create a mask with possible intersection points, apply some morphology and get the coordinates.
You did not provide your input image, I'm testing this algorithm with the "cross" image you posted. This is the code:
{kind=link}
# Imports:
import cv2
import numpy as np
# Image path
path = "D://opencvImages//"
fileName = "cross.png" # Your "cross" image
# Reading an image in default mode:
inputImage = cv2.imread(path fileName)
# Prepare a deep copy of the input for results:
inputImageCopy = inputImage.copy()
# Grayscale conversion:
grayscaleImage = cv2.cvtColor(inputImage, cv2.COLOR_BGR2GRAY)
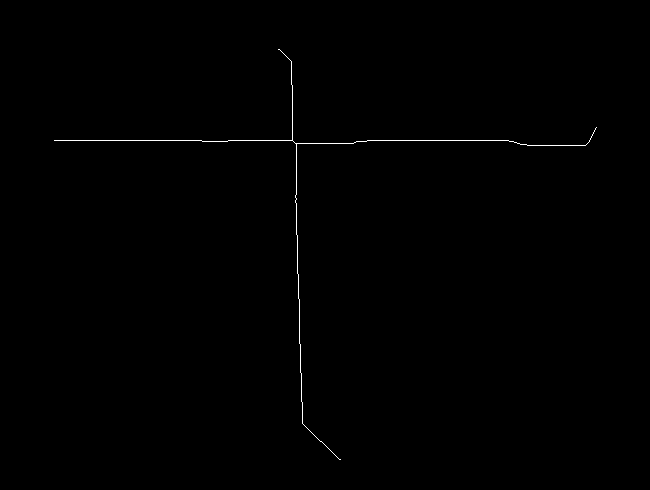
Now, the convolution must receive an image where the shapes have been reduced to a 1 pixel width. This can be done computing the skeleton of the image. The skeleton is a version of the binary image where lines have been normalized to have a width of 1 pixel. We can then convolve the image with a 3 x 3 kernel and look for specific pixel patterns.
Before computing the skeleton, we will add a border around the image. This prevents some artifacts that the skeleton yields if a shape extends all the way to the borders of the image:
# Add borders to prevent skeleton artifacts:
borderThickness = 1
borderColor = (0, 0, 0)
grayscaleImage = cv2.copyMakeBorder(grayscaleImage, borderThickness, borderThickness, borderThickness, borderThickness,
cv2.BORDER_CONSTANT, None, borderColor)
# Compute the skeleton:
skeleton = cv2.ximgproc.thinning(grayscaleImage, None, 1)
This is the skeleton, free of artifacts:
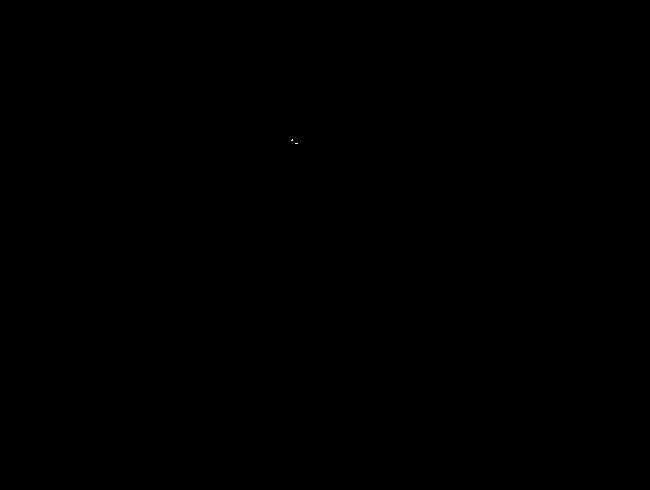
Now, let's find the intersections. The approach is based on Mark Setchell's info on this post. The post mainly shows the method for finding end-points of a shape, but I extended it to also identify line intersections. The main idea is that the convolution yields a very specific value where patterns of black and white pixels are found in the input image. Refer to the post for the theory behind this idea, but here, we are looking for a value of 130:
# Threshold the image so that white pixels get a value of 10 and
# black pixels a value of 0:
_, binaryImage = cv2.threshold(skeleton, 128, 10, cv2.THRESH_BINARY)
# Set the intersections kernel:
h = np.array([[1, 1, 1],
[1, 10, 1],
[1, 1, 1]])
# Convolve the image with the kernel:
imgFiltered = cv2.filter2D(binaryImage, -1, h)
# Prepare the final mask of points:
(height, width) = binaryImage.shape
pointsMask = np.zeros((height, width, 1), np.uint8)
# Perform convolution and create points mask:
thresh = 130
# Locate the threshold in the filtered image:
pointsMask = np.where(imgFiltered == thresh, 255, 0)
# Convert and shape the image to a uint8 height x width x channels
# numpy array:
pointsMask = pointsMask.astype(np.uint8)
pointsMask = pointsMask.reshape(height, width, 1)
This is the pointsMask image:
I we apply some morphology we can join individual pixels into blobs. Here, a dilation will do:
# Set kernel (structuring element) size:
kernelSize = 7
# Set operation iterations:
opIterations = 3
# Get the structuring element:
morphKernel = cv2.getStructuringElement(cv2.MORPH_RECT, (kernelSize, kernelSize))
# Perform Dilate:
pointsMask = cv2.morphologyEx(pointsMask, cv2.MORPH_DILATE, morphKernel, None, None, opIterations, cv2.BORDER_REFLECT101)
This is the result of applying the dilation:
Now, we can find the coordinates of the white pixels and compute their mean values (or centroids):
# Get the coordinates of the end-points:
(Y, X) = np.where(pointsMask == 255)
# Get the centroid:
y = int(np.mean(Y))
x = int(np.mean(X))
Let's draw a circle using these coordinates on the original image:
# Draw the intersection point:
# Set circle color:
color = (0, 0, 255)
# Draw Circle
cv2.circle(inputImageCopy, (x, y), 3, color, -1)
# Show Image
cv2.imshow("Intersections", inputImageCopy)
cv2.waitKey(0)
This is the final result:
CodePudding user response:
The idea is that the point where a vertical and horizontal line touch is the intersection. A potential approach is:
Obtain binary image. Load image, convert to grayscale, Gaussian blur, then Otsu's threshold.
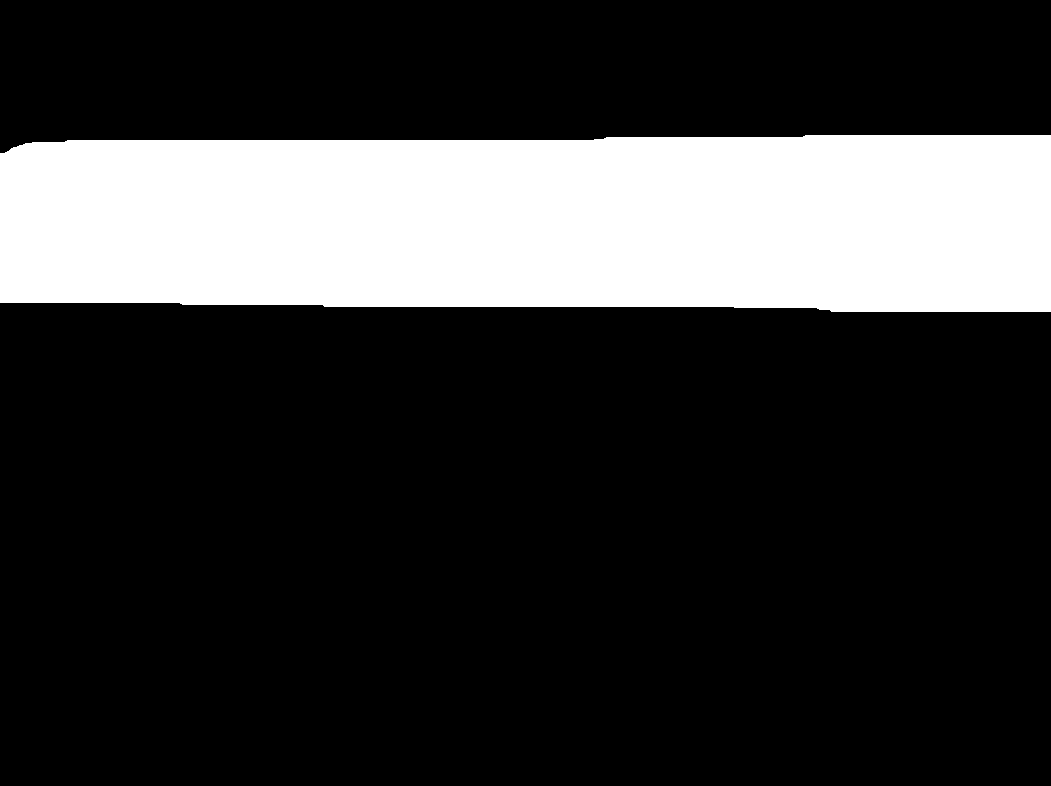
Obtain horizontal and vertical line masks. Create horizontal and vertical structuring elements with
cv2.getStructuringElementthen performcv2.morphologyExto isolate the lines.Find joints. We
cv2.bitwise_andthe two masks together to get the joints.Find centroid on joint mask. We find contours then calculate the centroid to get the intersection point.
Input image -> Horizontal mask -> Vertical mask -> Joints

Detected intersection in green
Results for the other image
Input image -> Horizontal mask -> Vertical mask -> Joints

Detected intersection in green
Code
import cv2
import numpy as np
# Load image, grayscale, Gaussian blur, Otsus threshold
image = cv2.imread('4.PNG')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (3,3), 0)
thresh = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)[1]
# Find horizonal lines
horizontal_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (150,5))
horizontal = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, horizontal_kernel, iterations=2)
# Find vertical lines
vertical_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,150))
vertical = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, vertical_kernel, iterations=2)
# Find joints
joints = cv2.bitwise_and(horizontal, vertical)
# Find centroid of the joints
cnts = cv2.findContours(joints, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
# Find centroid and draw center point
M = cv2.moments(c)
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image, (cx, cy), 15, (36,255,12), -1)
cv2.imshow('horizontal', horizontal)
cv2.imshow('vertical', vertical)
cv2.imshow('joints', joints)
cv2.imshow('image', image)
cv2.waitKey()