I've been working a bit on this simple rasterizer, but the cube I imported is not rotating properly. Here's a picture of the issue: 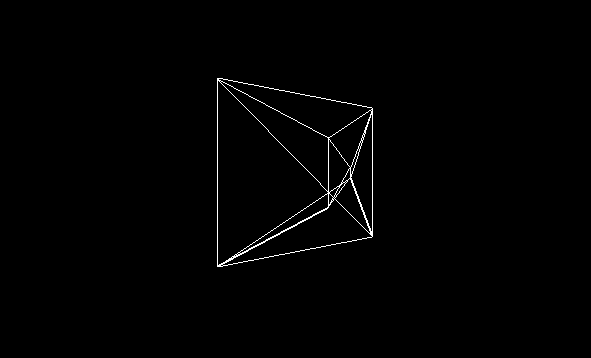
I copied a rotation matrix from this 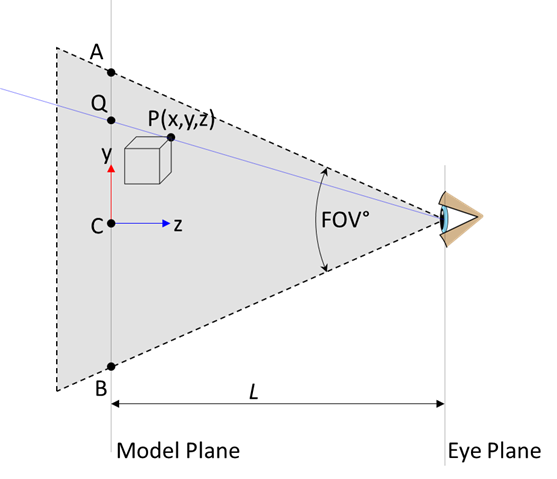
Given a point P with (x,y,z) coordinates, you want to find point Q which is the projection on the model plane.
More specifically you need to find the distance QC and relate it as a ratio to the distance AB. This is because on screen the distance AB corresponds to the height H in pixels of your viewport.
So the vertical pixel count is
y L
py = H * --- * ---
AB L-z
where L is the distance to the camera/eye along the z axis.
Sometimes the model size AB isn't known, but instead the field of view (FOV) in degrees is. From trigonometry, we have tan(fov/2*π/180) = AB/(2*L) which simplifies the projection as such
1 y
py = H * -------------- * ---
tan(fov*π/360) L-z
Typically the factor f=H/tan(fov*π/360) is pre-computed and the projection of point P is
px = f * (x/(L-z))
py = f * (y/(L-z))