I'm a novice at openCV, currently i'm following 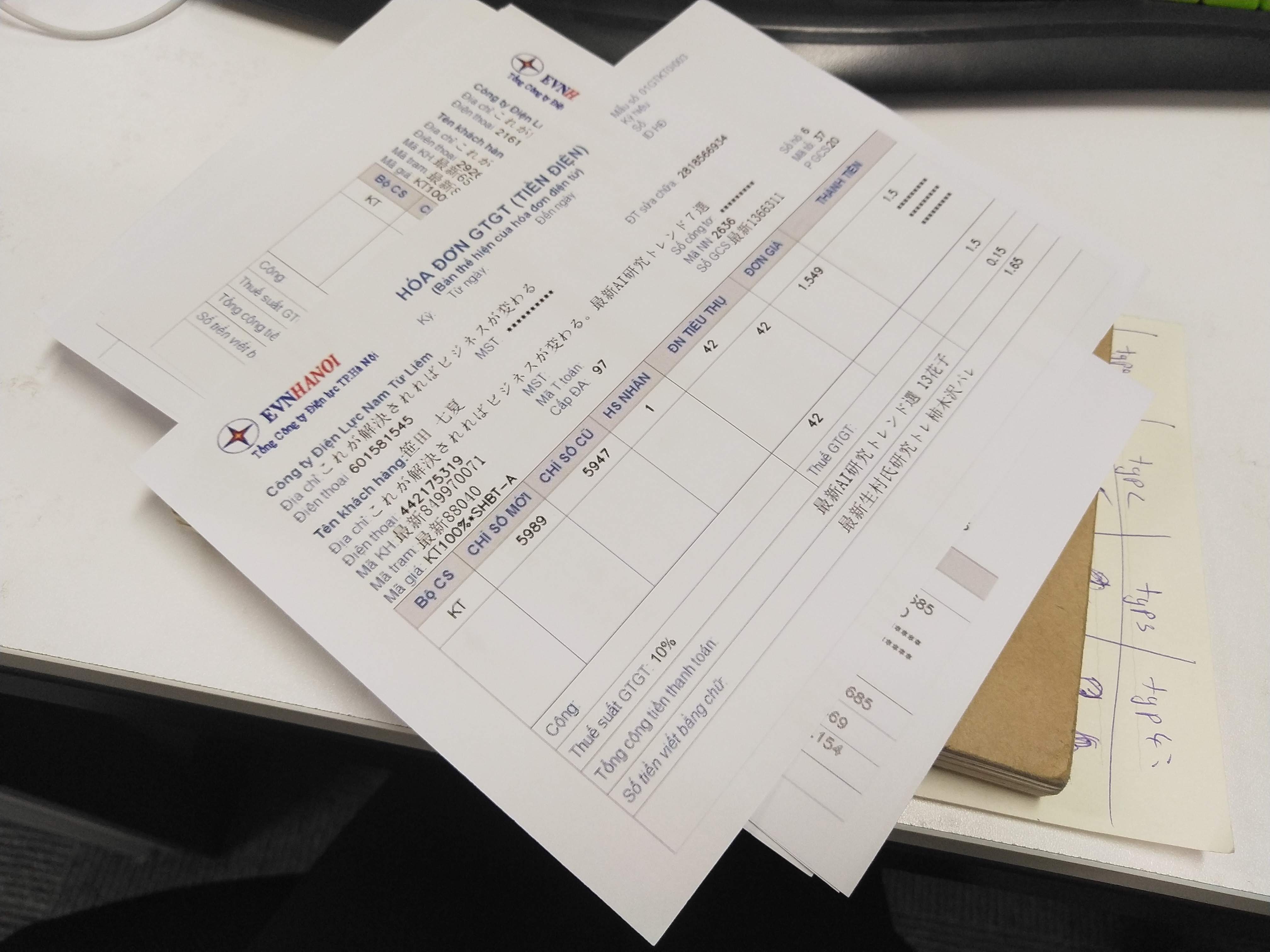
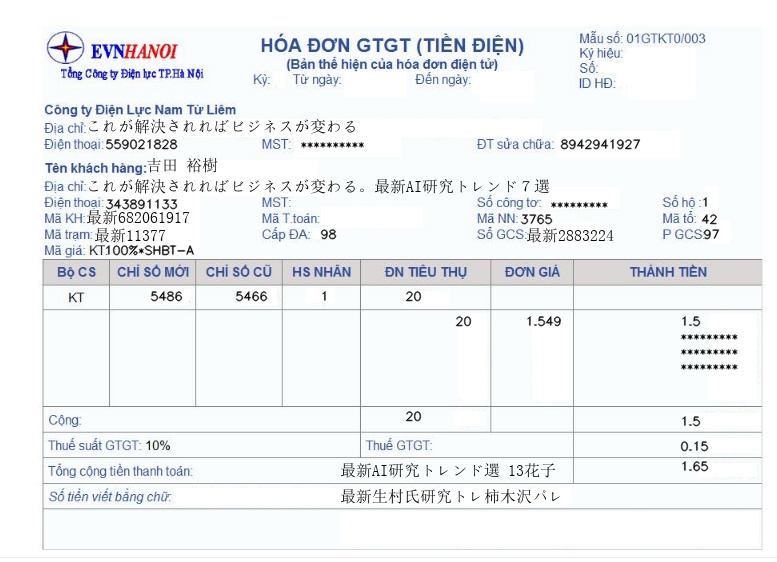
template image(template.jpg):
and the following python code:
from __future__ import print_function
import cv2
import numpy as np
MAX_FEATURES = 500
GOOD_MATCH_PERCENT = 0.15
def alignImages(im1, im2):
# Convert images to grayscale
im1Gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY)
im2Gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY)
# Detect ORB features and compute descriptors.
orb = cv2.ORB_create(MAX_FEATURES)
keypoints1, descriptors1 = orb.detectAndCompute(im1Gray, None)
keypoints2, descriptors2 = orb.detectAndCompute(im2Gray, None)
# Match features.
matcher = cv2.DescriptorMatcher_create(
cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
matches = list(matcher.match(descriptors1, descriptors2, None))
# Sort matches by score
matches.sort(key=lambda x: x.distance, reverse=False)
# Remove not so good matches
numGoodMatches = int(len(matches) * GOOD_MATCH_PERCENT)
matches = matches[:numGoodMatches]
# Draw top matches
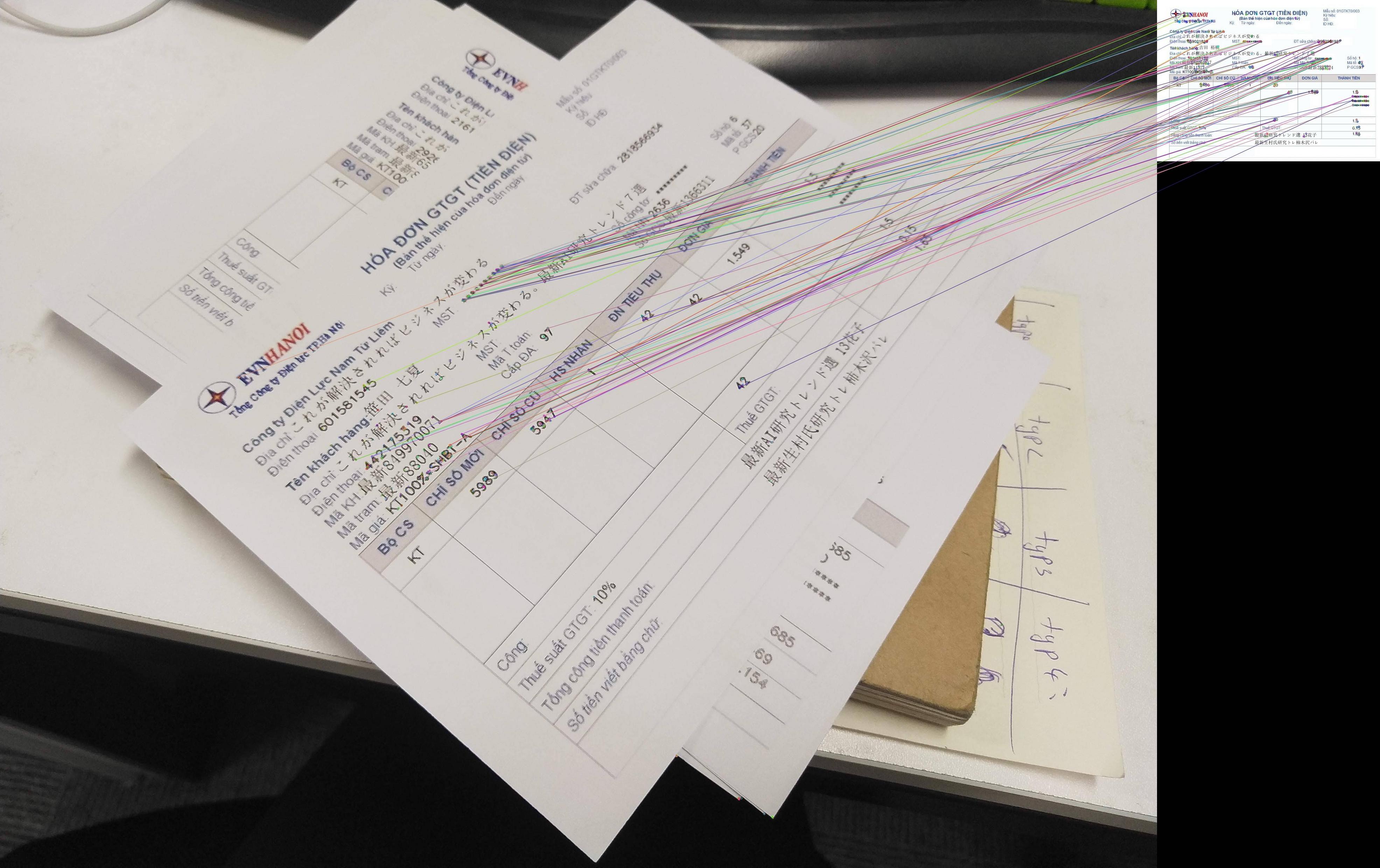
imMatches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None)
cv2.imwrite("matches.jpg", imMatches)
# Extract location of good matches
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints1[match.queryIdx].pt
points2[i, :] = keypoints2[match.trainIdx].pt
# Find homography
h, mask = cv2.findHomography(points1, points2, cv2.RANSAC)
# Use homography
height, width, channels = im2.shape
im1Reg = cv2.warpPerspective(im1, h, (width, height))
return im1Reg, h
if __name__ == '__main__':
# Read reference image
refFilename = "template.jpg"
print("Reading reference image : ", refFilename)
imReference = cv2.imread(refFilename, cv2.IMREAD_COLOR)
# Read image to be aligned
imFilename = "test_image.jpg"
print("Reading image to align : ", imFilename)
im = cv2.imread(imFilename, cv2.IMREAD_COLOR)
print("Aligning images ...")
# Registered image will be resotred in imReg.
# The estimated homography will be stored in h.
imReg, h = alignImages(im, imReference)
# Write aligned image to disk.
outFilename = "aligned.jpg"
print("Saving aligned image : ", outFilename)
cv2.imwrite(outFilename, imReg)
# Print estimated homography
print("Estimated homography : \n", h)
I get the following results after i ran the script:
matches.jpg:
UPDATE:
I was able to get the image when i increase the amount of orb features to 2000
aligned.jpg
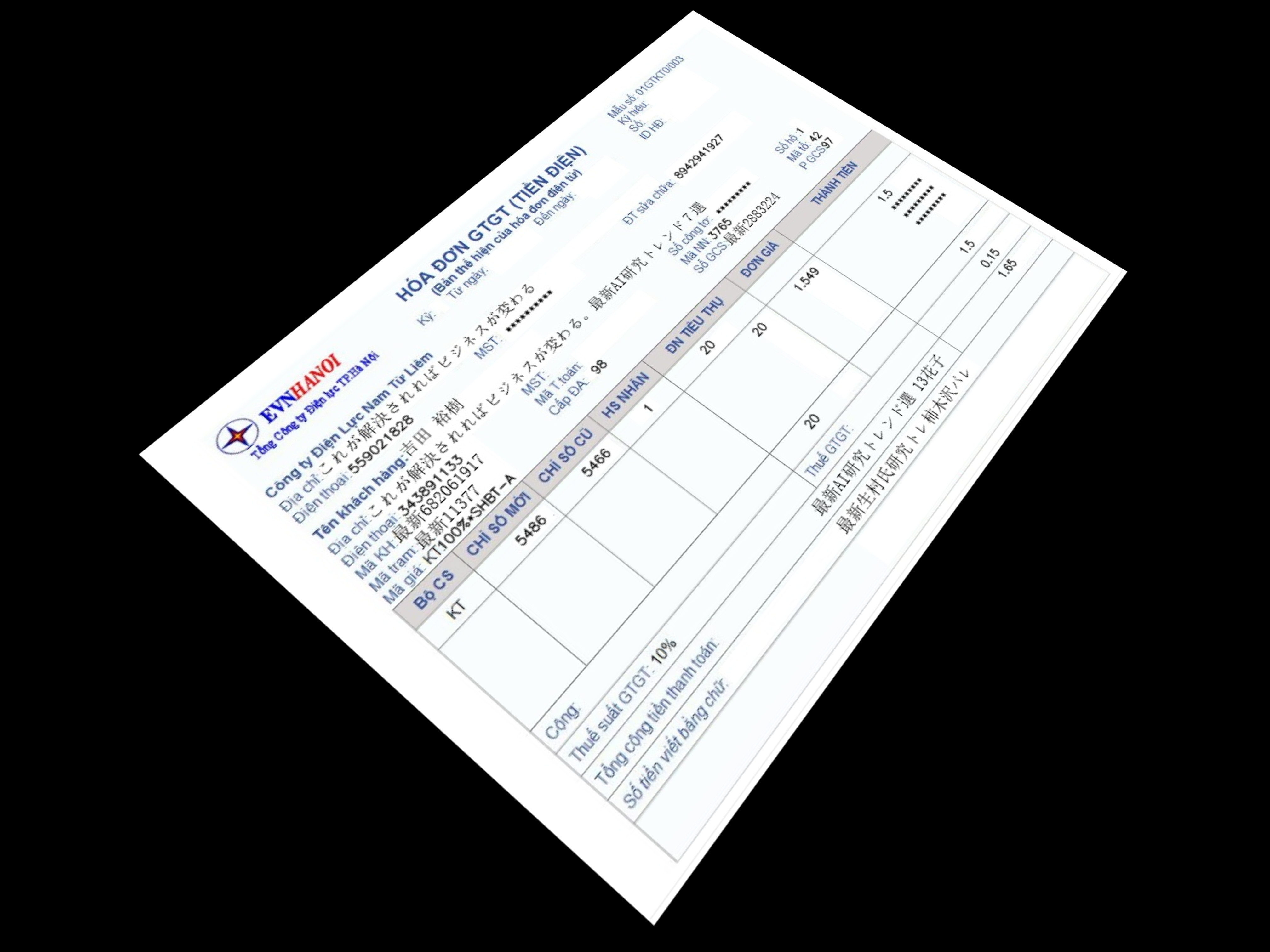
But the homography is still not rotating the image, how can i rotate the image to the same position as the template?
CodePudding user response:
There are two types of forms to finding a homography (forward and backward), but if you already found the homography, applying it can be done without using opencv as follows:
import numpy as np
from scipy.interpolate import griddata
# creating the homogenious coordinates
src_h, src_w, _ = src_image.shape
values = np.matrix.reshape(src_image, (-1, 3), order='F')
yy, xx = np.meshgrid(np.arange(src_h), np.arange(src_w))
input_flat = np.concatenate((xx.reshape((1, -1)), yy.reshape((1, -1)), np.ones_like(xx.reshape((1, -1)))), axis=0)
# applying the homography and converting back to homogenious coordinates
points = np.matmul(homography, input_flat)
points_homogeneous = points[0:2, :] / points[2, :]
# interpolating the result to nicely fit the grid coordinates
dst_image_shape = [400, 400] # could be any number here
yy, xx = np.meshgrid(np.arange(dst_image_shape[1]), np.arange(dst_image_shape[0]))
src_image_warp = griddata(np.transpose(points_homogeneous ), values_relevant, (yy, xx), method='linear')
#numerical rounding
src_image_warp[np.isnan(src_image_warp)] = 0
src_image_warp[src_image_warp > 255] = 255
src_image_warp = np.uint8(src_image_warp)
Note that this is done for a 1 channel image, for RGB image this has to be done for each channel searately. In addition, this could be made to run faster by interpolating only the relevant coordinates since the interpolation is the most time-consuming operation.
With opencv this can be done by:
import cv2
image_dst = cv2.warpPerspective(image_src, homography, size) # size is a tuple (width, height) of the destination image
Read more on homographies and the opencv implementation here.
Finding the homography
The homography can be found without using opencv but that requires knowlage in linear algebra adn the explanation is a bit lengthy, if needed I will post it as an edit. For any practical case however, the homography can be found using opencv as follows:
homography, status = cv2.findHomography(pts_src, pts_dst)
where pts_src are coordinates in the original image and pts_dst are their matching location in the destination image. Since you already found the point pairs, this will yield you the homography (opencv optimizes the hmography for minimal distortion in the backward operation which is the correct way to perform homography computations).
CodePudding user response:
You have a homography h calculated from findHomography and you can use warpPerspective to transform the template to have the same perspective as the photo.
Now you just need to invert the homography, and apply it to the photo instead of the template.
Either use np.linalg.inv for that, or pass the WARP_INVERSE_MAP flag to warpPerspetive instead.