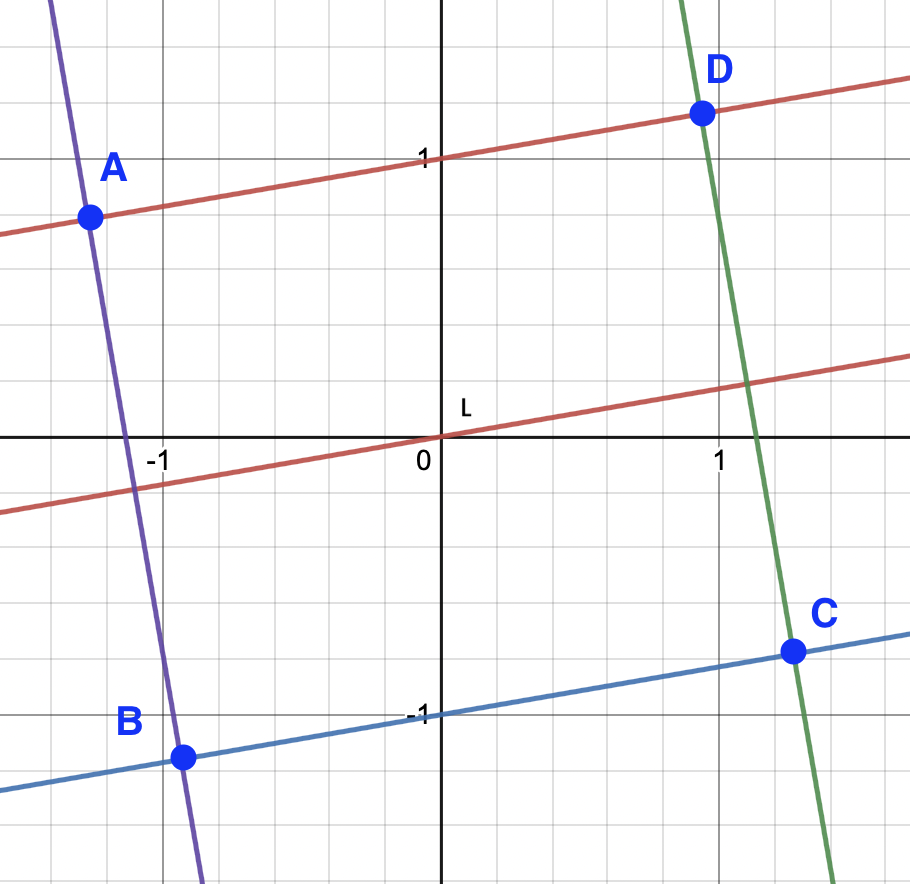
I have to find in Python the coordinates of the points A, B, C, D given their distances and the gradient of the line L (the one that passes through the center), which is parallel to segments AD and BC and orthogonal to segments AB and CD.
That is the code I wrote:
import numpy as np
# Gradient of the known line
l_gradient = 0.17
l_angle = np.arctan(l_gradient)
# Length of the segments
ad_distance = 1
ab_distance = 2
# Gradient and Intercept of lines AB and DC with the y axes
ab_gradient = dc_gradient = -1 / l_gradient # orthogonal to L
dc_intercept = (ad_distance / 2) / np.sin(l_angle) # Inverse formula of the right triangle
ab_intercept = - dc_intercept
# Gradient and Intercept of lines AD and BC with the y axes
ad_gradient = bc_gradient = l_gradient # parallel to L
ad_intercept = (ab_distance / 2) / np.cos(l_angle) # Inverse formula of the right triangle
bc_intercept = - ad_intercept
CodePudding user response:
I think the easiest way to do this is first assume the gradient is 0. Then we have our points:
ad_distance = 1
ab_distance = 2
points = np.array([
[-ad_distance / 2, ab_distance / 2], # A
[-ad_distance / 2, -ab_distance / 2], # B
[ ad_distance / 2, -ab_distance / 2], # C
[ ad_distance / 2, ab_distance / 2], # D
])
Note that at the bottom we have a triangle with sides (x, l_gradient x, sqrt(1 l_gradient^2) x). And remember cos(angle) = adjacent / hypot.
Thus we have:
l_gradient = 0.17
l_cos = 1 / np.sqrt(1 l_gradient**2)
l_sin = l_gradient * l_cos
Now we can use those to construct a rotation matrix, and rotate our points into the correct positions:
l_rot = np.array([[l_cos , -l_sin], [l_sin, l_cos]])
points = (l_rot @ points.T).T
No trigonometry functions required!