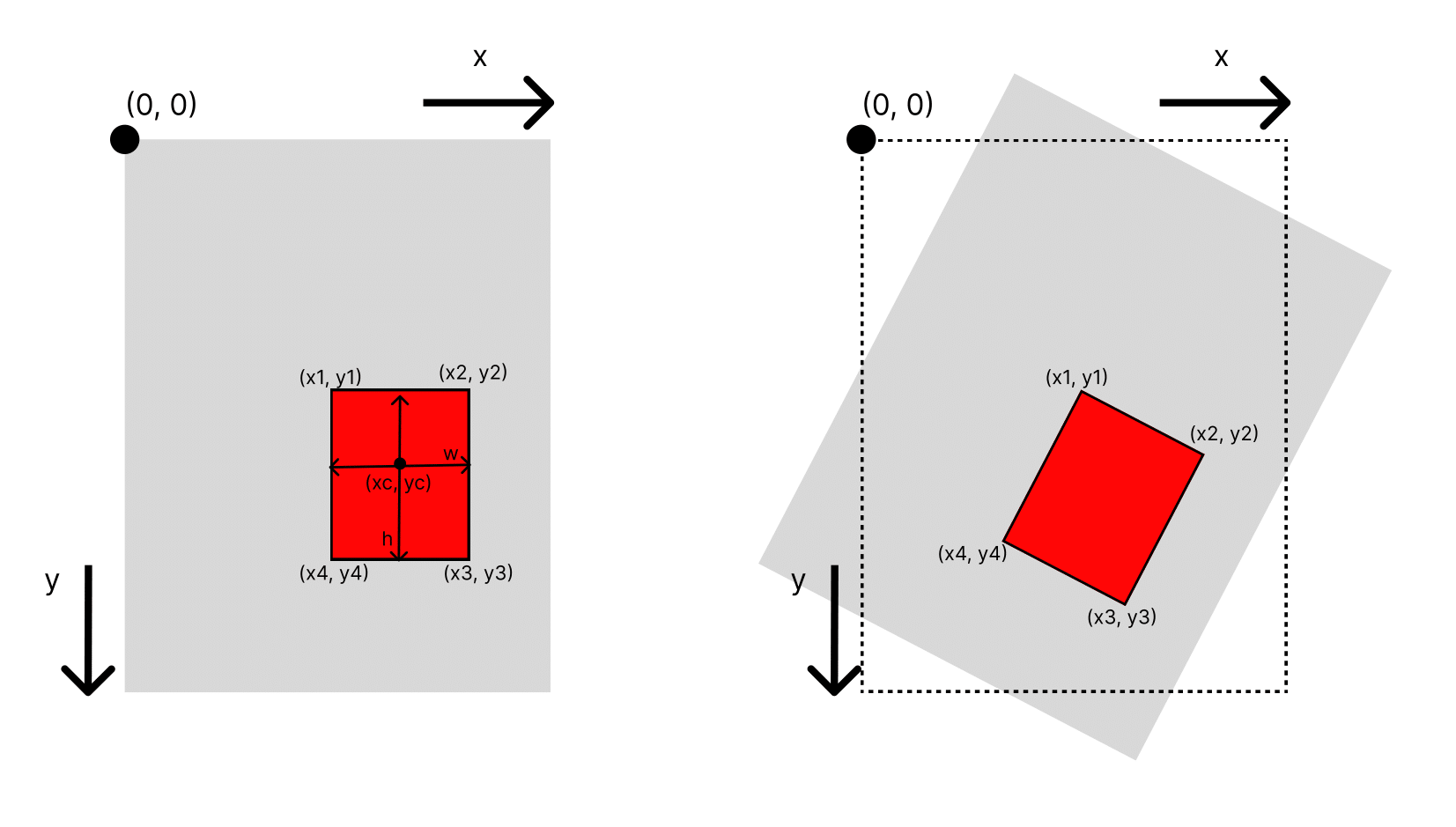
Having a dataset of aligned objects, I would like to augment it by applying random rotations with the axis at the center of the object. Below is the rotation representation (left original, right image rotated around the point (xc, yc). for rotation, I have used the following logic:
import cv2
import random
image_source = cv2.imread('sample.png')
height, width = image_source.shape[:2]
random_angle = random.uniform(90, 90)
yolo_annotation_sample = get_annotation() # this function retrieves yolo annotation
label_id, xc, yc, object_width, object_height = yolo_annotation_sample # e.g. 4, 0.0189, 0.25, 0.0146, 0.00146
center_x = width * xc
center_y = height * yc
left = center_x - (width * object_width) / 2
top = center_y - (height * object_height) / 2
right = left width * object_width
bottom = top height * object_height
M = cv2.getRotationMatrix2D((cx, cy), random_angle, 1.0)
image_rotated = cv2.warpAffine(image_source, M, (width, height))
# logic for calculating new point position (doesn't work)
x1_y1 = np.asarray([[left, top]])
x1_y1_new = np.dot(x1_y1, M)
x2_y2 = np.asarray([[right, top]])
x2_y2_new = np.dot(x2_y2, M)
x3_y3 = np.asarray([[right, bottom]])
x3_y3_new = np.dot(x3_y3, M)
x4_y4 = np.asarray([[left, bottom]])
x4_y4_new = np.dot(x4_y4, M)
Does anyone know how to recalculate the point(s) after rotating around the arbitrary point as shown above?
CodePudding user response:
Use cv2.transform(points, M). Points with shape: (4, 1, 2). Full code:
import cv2
import random
import numpy as np
image_source = cv2.imread('sample.png')
height, width = image_source.shape[:2]
random_angle = 40 #random.uniform(90, 90)
yolo_annotation_sample = (4, 0.6189, 0.25, 0.246, 0.0846) # this function retrieves yolo annotation
label_id, xc, yc, object_width, object_height = yolo_annotation_sample
center_x = width * xc
center_y = height * yc
left = center_x - (width * object_width) / 2
top = center_y - (height * object_height) / 2
right = left width * object_width
bottom = top height * object_height
cx, cy = width / 2, height / 2
M = cv2.getRotationMatrix2D((cx, cy), random_angle, 1.0)
image_rotated = cv2.warpAffine(image_source, M, (width, height))
# logic for calculating new point position (doesn't work)
bbox_points = [[left, top], [right, top], [right, bottom], [left, bottom]]
bbox_points = np.array(bbox_points).reshape((-1,1,2))
rotated_points = cv2.transform(bbox_points, M) # what you need
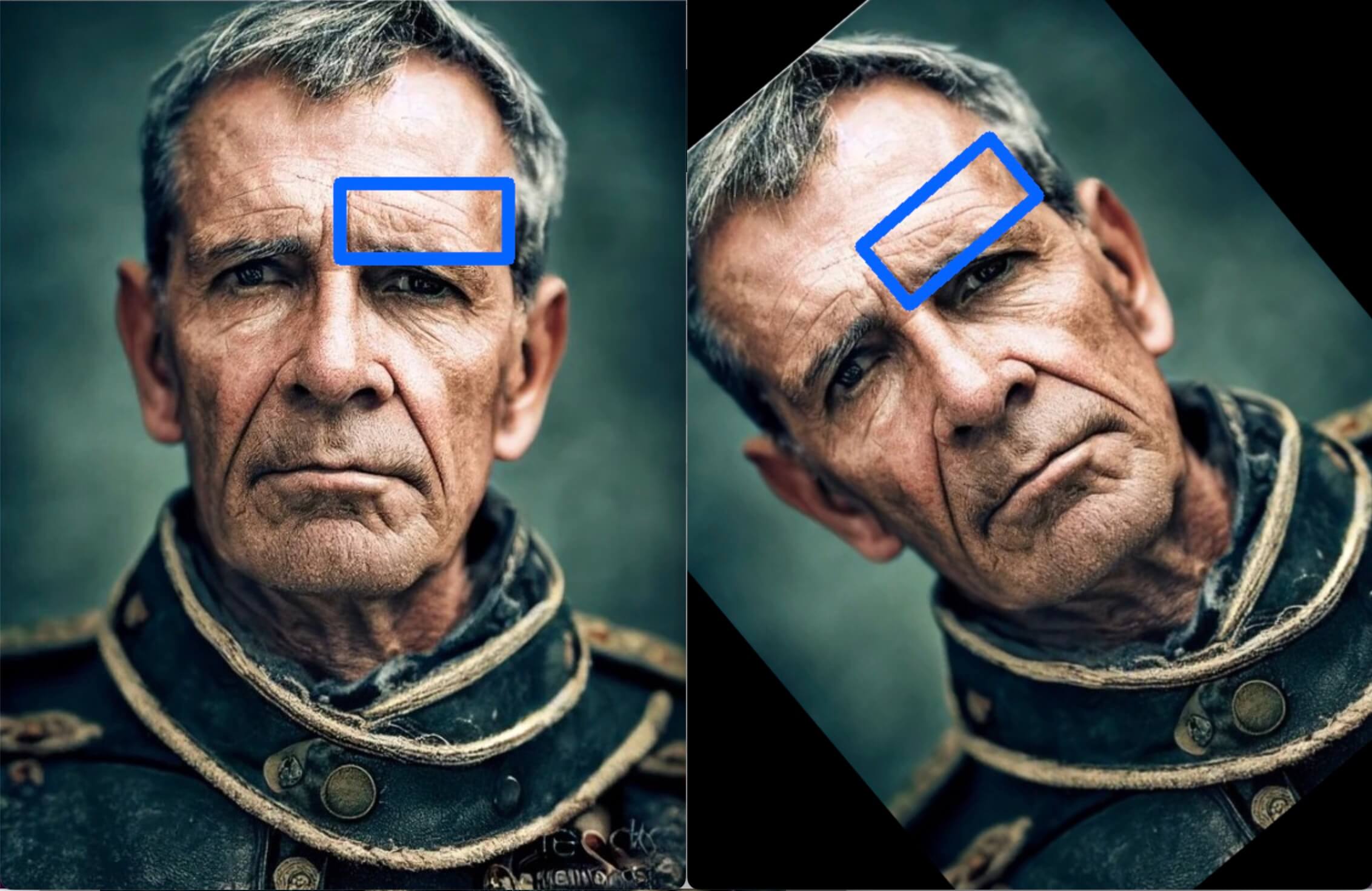
cv2.polylines(image_source,[bbox_points.astype(int)],True,(255,100,0), 10)
cv2.polylines(image_rotated,[rotated_points.astype(int)],True,(255,100,0), 10)
cv2.imshow("orig", image_source)
cv2.imshow("rotated", image_rotated)
cv2.waitKey()
CodePudding user response:
Look at [https://en.wikipedia.org/wiki/Transformation_matrix][1]
Once I tried to calculate it myself:
class rotm :
'''set up rotation matrix'''
def __init__(self,axis,angle,unit="radians") :
self.m = scipy.zeros((4,4),scipy.float128)
if unit=="radians" :
angler = angle
else :
angler = math.radians(angle)
pass
if axis=='x' :
self.m[0][0]=1.0
self.m[1][1]=math.cos(angler)
self.m[2][2]=self.m[1][1]
self.m[3][3]=1.0
self.m[1][2]=-math.sin(angler)
self.m[2][1]=-self.m[1][2]
elif axis=='y' :
self.m[0][0]=math.cos(angler)
self.m[1][1]=1.0
self.m[2][2]=self.m[0][0]
self.m[3][3]=1.0
self.m[0][2]=math.sin(angler)
self.m[2][0]=-self.m[0][2]
elif axis=='z' :
self.m[0][0]=math.cos(angler)
self.m[1][1]=self.m[0][0]
self.m[2][2]=1.0
self.m[3][3]=1.0
self.m[0][1]=-math.sin(angler)
self.m[1][0]=-self.m[0][1]
pass
pass
def fPrint(self) :
'''auxiliary function: print transformation matrix '''
print(self.m)
pass
pass #end of rotm class