I have image of robot with yellow markers as shown
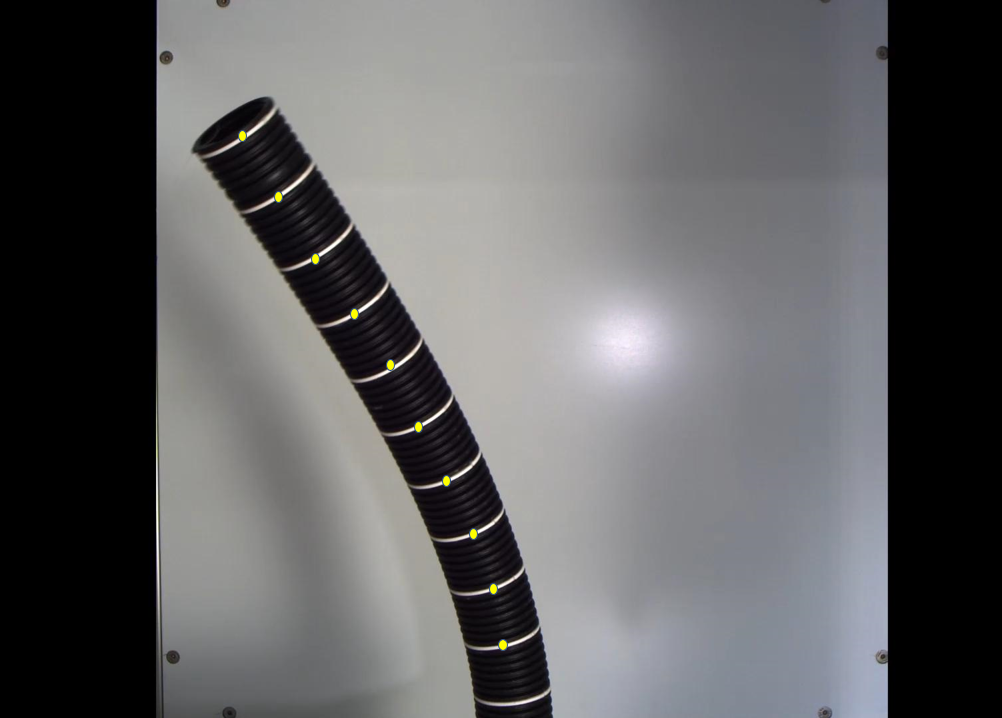
The yellow points shown are the markers. There are two cameras used to view placed at an offset of 90 degrees. The robot bends in between the cameras. The crude schematic of the setup can be referred.
https://i.stack.imgur.com/aVyDq.png
{kind=link}
Using the two cameras I am able to get its 3d co-ordinates of the yellow markers. But, I need to find the 3d-co-oridnates of the central point of the robot as shown.
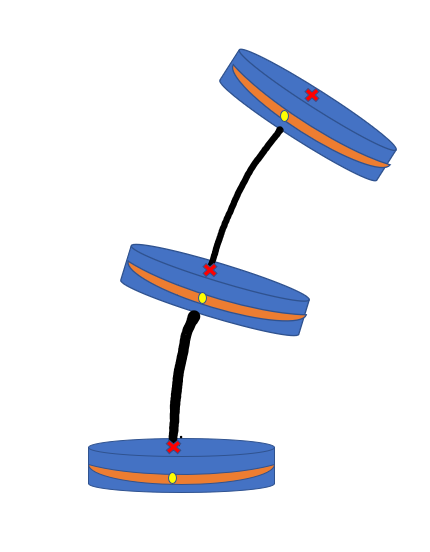
I need to find the 3d position of the red marker points which is inside the cylindrical robot. Firstly, is it even feasible? If yes, what is the method I can use to achieve this? As a bonus, is there any literature where they find the 3d location of such internal points which I can refer to (I searched, but could not find anything similar to my ask).
I am welcome to a theoretical solution as well(as long as it assures to find the central point within a reasonable error), which I can later translate to code.
CodePudding user response:
If you know the actual dimensions, or at least, shape (e.g. perfect circle) of the white bands, then yes, it is feasible and possible.
You need to do the following steps, which are quite non trivial to do, and I won't do them here:
Optional but extremely suggested: calibrate your camera, and undistort it.
find the equation of the projection of a 3D circle into a 2D camera, for any given rotation. You can simplify this by assuming the white line will be completely horizontal. You want some function that takes the parameters that make a circle and a rotation.
Find all white bands in the image, segment them, and make them horizontal (rotate them)
Fit points in the corrected white circle to the equation in (1). That should give you the parameters of the circle in 3d (radious, angle), if you wrote the equation right.
Now that you have an analytic equation of the actual circle (equation from 1 with parameters from 3), you can map any point from this circle (e.g. its center) to the image location. Remember to uncorrect for the rotations in step 2.
This requires understanding of curve fitting, some geometric analytical maths, and decent code skills. Not trivial, but this will provide a solution that is highly accurate.
For an inaccurate solution:
- Find end points of white circles
- Make line connecting endpoints
- Chose center as mid point of this line.
This will be inaccurate because: choosing end points will have more error than fitting an equation with all points, ignores cone shape of view of the camera, ignores geometry.
But it may be good enough for what you want.