I am processing binary images, and was previously using this code to find the largest area in the binary image:
# Use the hue value to convert to binary
thresh = 20
thresh, thresh_img = cv2.threshold(h, thresh, 255, cv2.THRESH_BINARY)
cv2.imshow('thresh', thresh_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# Finding Contours
# Use a copy of the image since findContours alters the image
contours, _ = cv2.findContours(thresh_img.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
#Extract the largest area
c = max(contours, key=cv2.contourArea)
This code isn't really doing what I need it to do, now I think it would better to extract the most central area in the binary image.
a cv.floodFill() on the center point can also quickly yield a labeling on that blob... assuming the mask is positive there. Otherwise, there needs to be search.
(cx, cy) = center.astype(int)
assert mask[cy,cx], "floodFill not applicable"
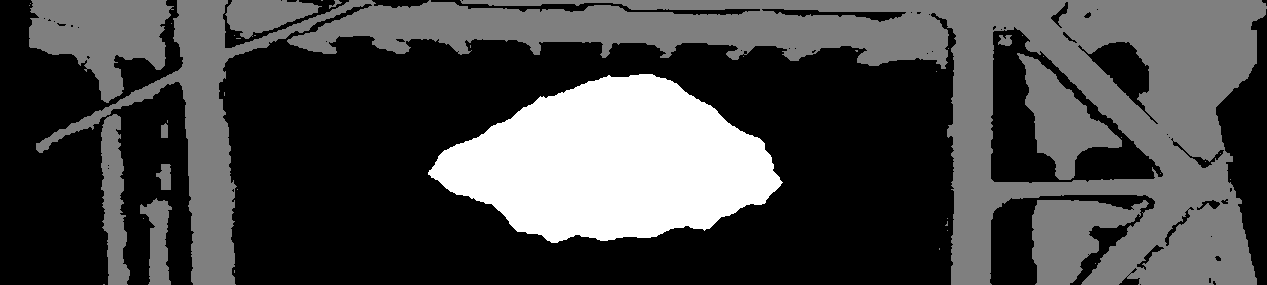
# trying cv.floodFill on the image center
mask2 = mask >> 1 # turns everything else gray
cv.floodFill(image=mask2, mask=None, seedPoint=center.astype(int), newVal=255)
# use (mask2 == 255) to identify that blob
This also takes less than a millisecond.
Some practically faster approaches might involve a pyramid scheme (low-res versions of the mask) to quickly identify areas of the picture that are candidates for an exact test (distance/intersection).
- Test target pixel. Hit (positive)? Done.
- Calculate low-res mask. Per block, if any pixel is positive, block is positive.
- Find positive blocks, sort by distance, examine closer all those that are within
sqrt(2) * blocksizeof the best distance.
CodePudding user response:
There are several ways you define "most central." I chose to define it as the region with the closest distance to the point you're searching for. If the point is inside the region, then that distance will be zero.
I also chose to do this with a pixel-based approach rather than a polygon-based approach, like you're doing with findContours().
Here's a step-by-step breakdown of what this code is doing.
- Load the image, put it into grayscale, and threshold it. You're already doing these things.
- Identify connected components of the image. Connected components are places where there are white pixels which are directly connected to other white pixels. This breaks up the image into regions.
- Using
np.argwhere(), convert a true/false mask into an array of coordinates. - For each coordinate, compute the Euclidean distance between that point and search_point.
- Find the minimum within each region.
- Across all regions, find the smallest distance.
import cv2
import numpy as np
img = cv2.imread('test197_img.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
_, thresh_img = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
n_groups, comp_grouped = cv2.connectedComponents(thresh_img)
components = []
search_point = [600, 150]
for i in range(1, n_groups):
mask = (comp_grouped == i)
component_coords = np.argwhere(mask)[:, ::-1]
min_distance = np.sqrt(((component_coords - search_point) ** 2).sum(axis=1)).min()
components.append({
'mask': mask,
'min_distance': min_distance,
})
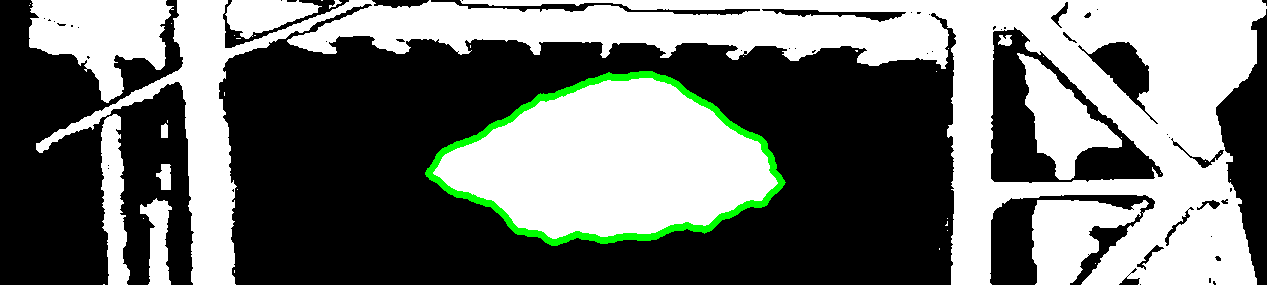
closest = min(components, key=lambda x: x['min_distance'])['mask']
Output:
