clear;
clc;
Th % d a alpha sigma offset
L (1)=Link ([0 0 0 0 1 PI/2], 'modified'); % define connecting rod
L (2)=Link ([- PI/2 0 0 0 0 0], 'modified');
L (3)=Link ([0 0 0 0-1.08 PI/2], 'modified');
0.99 L (4)=Link ([0 0 0 - PI PI/2/2], 'modified');
L (5)=Link ([0 0 0 0 0 PI/2], 'modified');
L (6)=Link ([0 0-0.23 PI/2 0 0], 'modified');
L (1). Qlim=1.5 [0];
L (2). Qlim=[- PI PI/2/2);
L (3). Qlim=[- PI PI/2/2);
L (4). Qlim=[- PI PI/2/2);
L (5). Qlim=[- PI PI/2/2);
L (6). Qlim=[- PI PI/2/2);
Bot (L=SerialLink, the 'name', 'six degrees of freedom robot'); % connection link
Bot. The display;
Q=[0 0 0 0 0 0];
W=[0, 4, 5, 5, 5, 5].
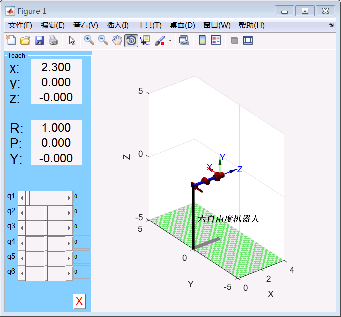
Bot. The plot (q, 'workspace', w);
Bot. Called;
CodePudding user response:
By the way, the first connecting rod is 2 d