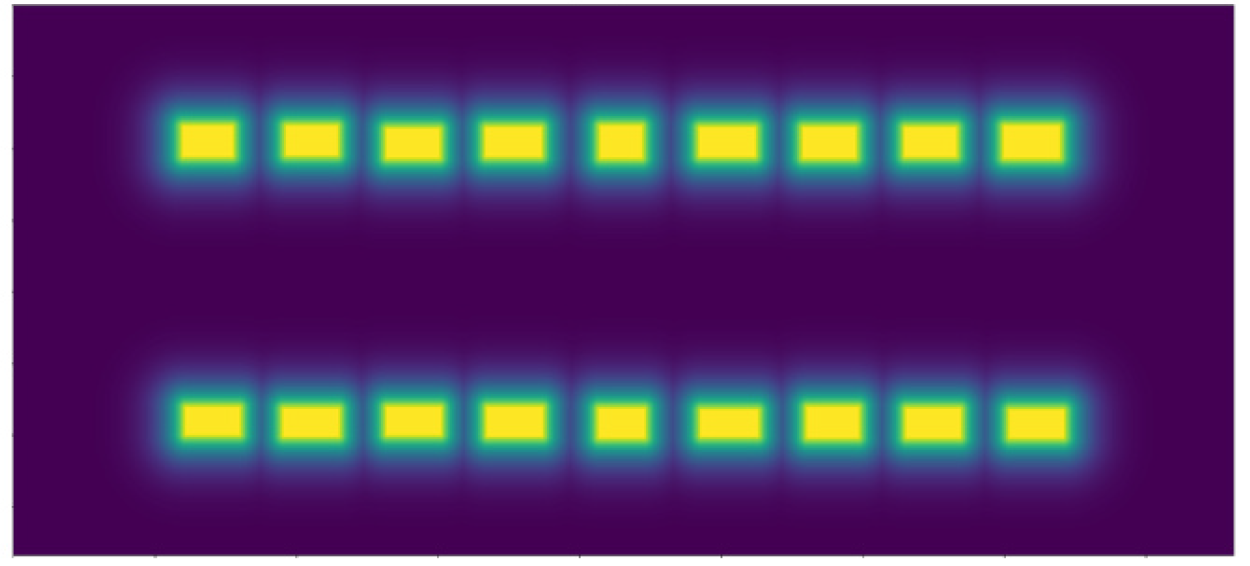
I was reading a paper that used distance transform to get a probability map, as shown below:
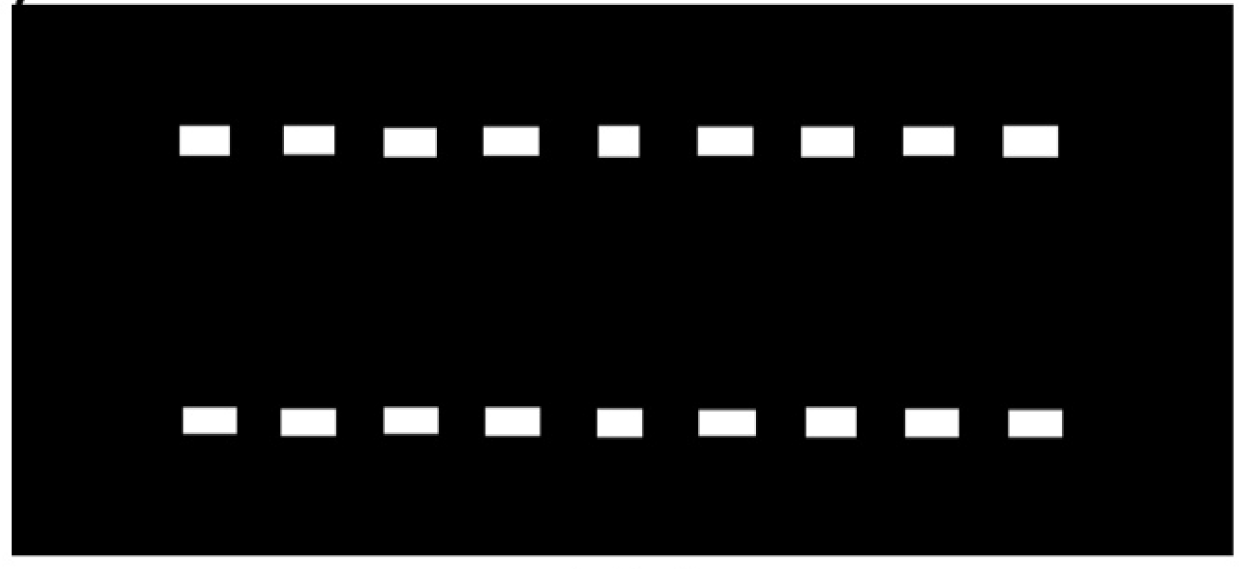
 using the binary image:
using the binary image:
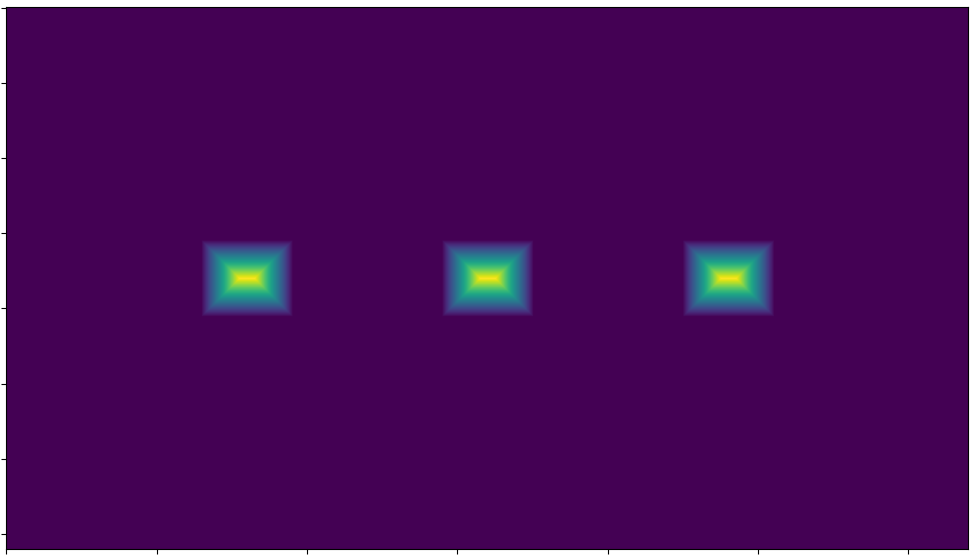
 The map by the paper is so much more "concentrated and filled" (notice the fatter yellow and no pointy lines), compared to mine:
The map by the paper is so much more "concentrated and filled" (notice the fatter yellow and no pointy lines), compared to mine:
According to the paper, this is what it's described as:
...convert them to continuous distance maps by a distance transform and normalize them from 0 to 1 to form a probability map
This is my code:
import numpy as np
import matplotlib.pyplot as plt
import cv2
m = np.zeros((720, 1280), dtype=np.uint8)
pts = np.array([[320, 360], [640, 360], [960, 360]])
# rectangle size
rh, rw = 100, 120
for x, y in pts:
m = cv2.rectangle(m, (int(x - rw / 2), int(y - rh / 2)), (int(x rw / 2), int(y rh / 2)), (255, 255, 255), -1)
m = cv2.distanceTransform(m, cv2.DIST_L2, cv2.DIST_MASK_5)
plt.imshow(m)
Any idea how to tweak my code to get closer to what the paper did?
CodePudding user response:
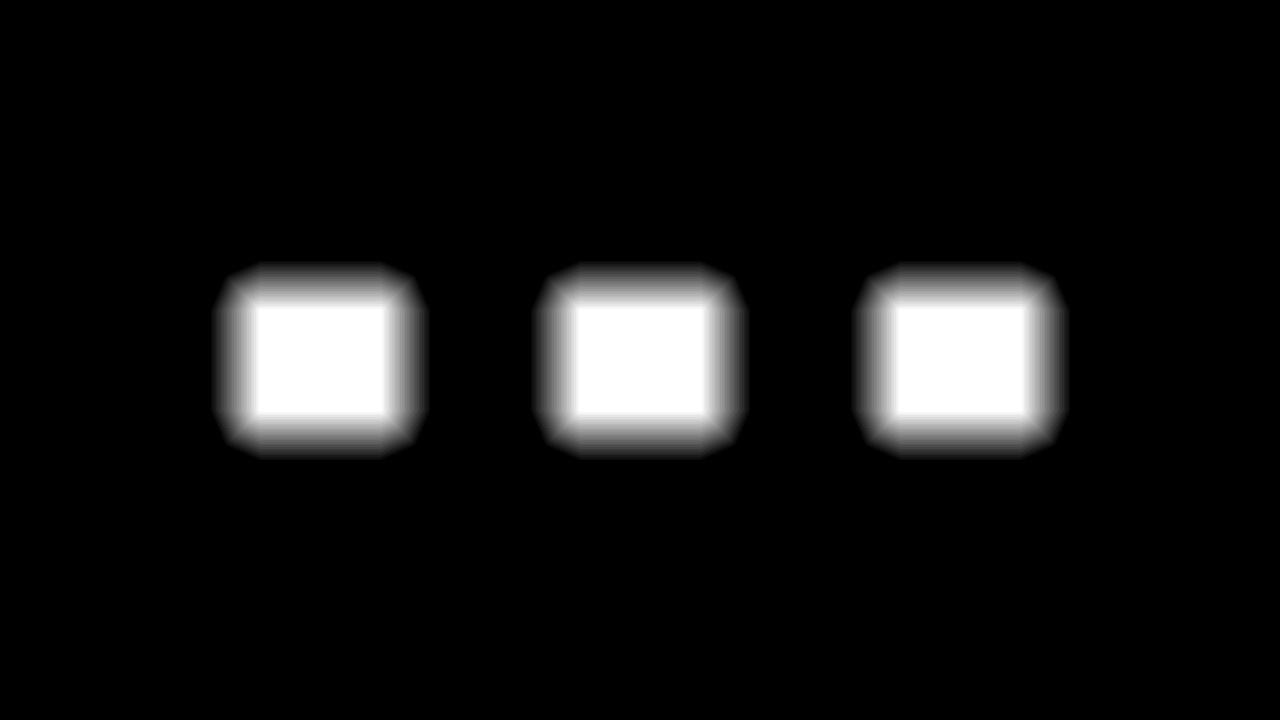
You need to first invert your image m, so that your boxes become black. Then perform distance threshold:
inv_m = cv2.bitwise_not(m)
dist_img = cv2.distanceTransform(inv_m, cv2.DIST_L2, 3)
norm_img = cv2.normalize(dist_img, dist_img, 0, 1.0, cv2.NORM_MINMAX)
Using scikit image library, scale the range of intensity to 255:
scale_img = skimage.exposure.rescale_intensity(norm_img, in_range='image', out_range=(0,255)).astype(np.uint8)

Now create a range within this intensity scale, here I chose input range of (0-30). And then invert it:
scale_img2 = skimage.exposure.rescale_intensity(scale_img, in_range=(0,30), out_range=(0,255)).astype(np.uint8)
final_img = cv2.bitwise_not(scale_img2)
This post is based on a recent answer by fmw42