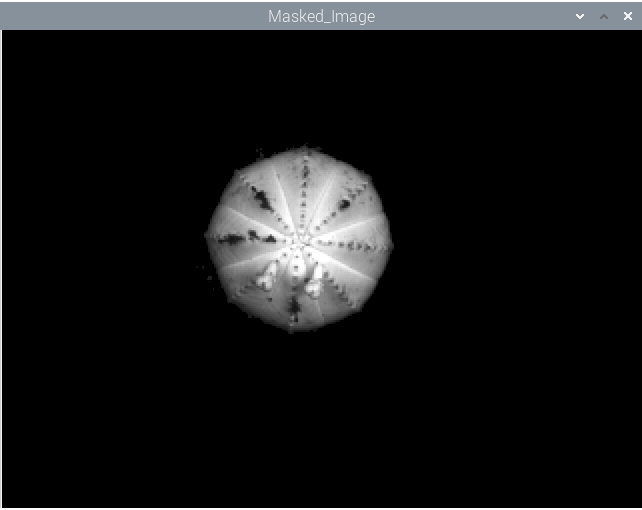
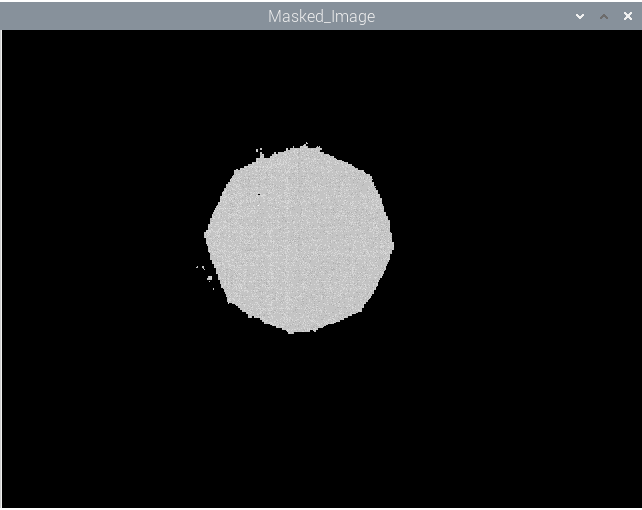
I am working on a diy image fluorometer (it measures fluorescence from plants) which measures the average intensity of pixels within a binary mask. At first, the fluorometer captures the mask and stores it. On a second run, while the lights are off, the script starts and saves the cv2.mean() results on a csv; after few seconds the lights go on and the measurement as such starts. The reason to start the measurement while the lights are off is that we need the baseline (or dark image). The problem I've got, is that while the light is off, the masked image contains 'salt and pepper' noise, as opposed to a black (zero) image, and that is distorting my measurements. See a couple of images of a small cactus with light on (full fluorescence) and with the light off (salt & pepper).
My question is, is it possible to get rid of that noise?
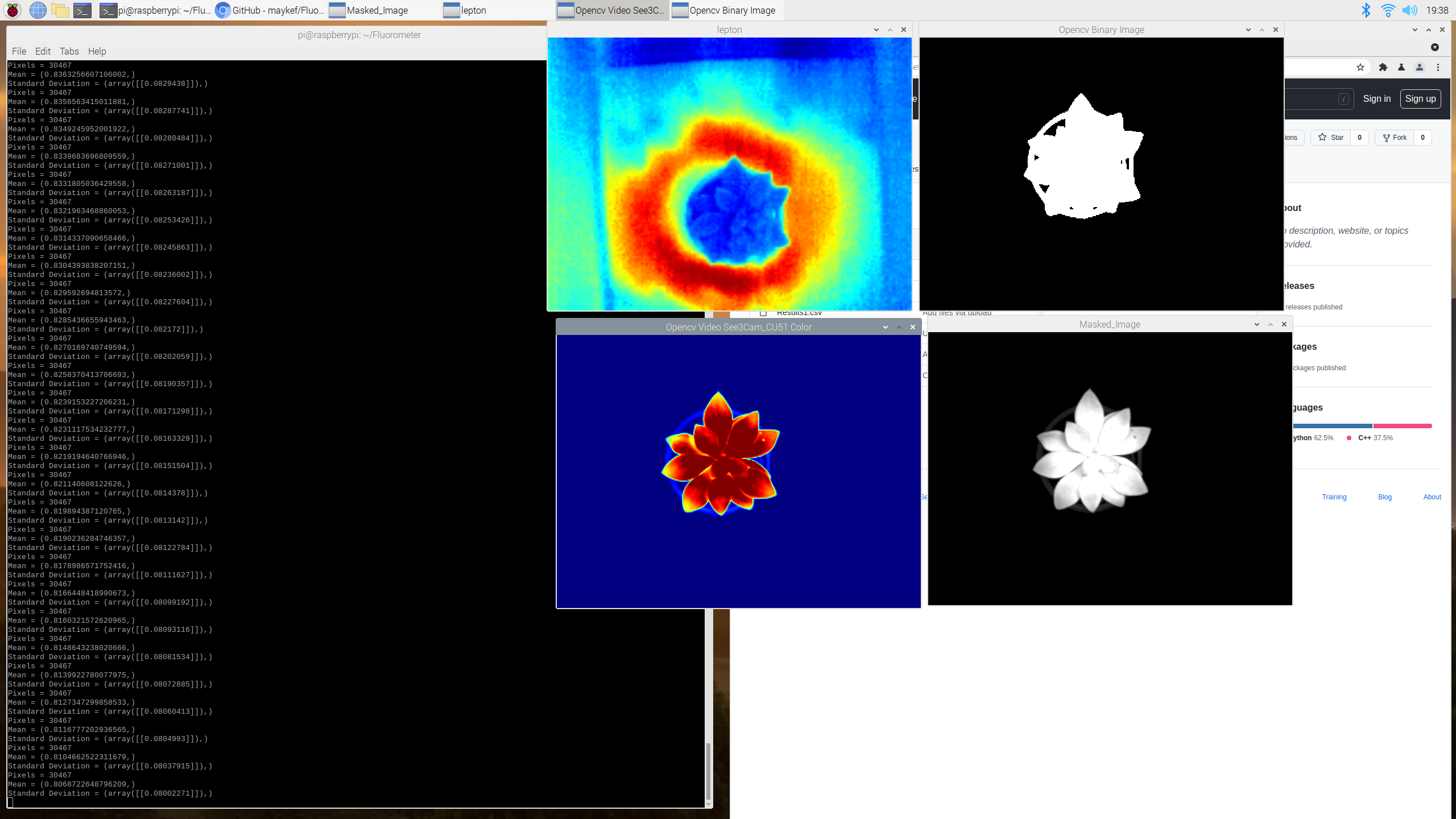
I am using a raspberry pi compute module at the moment, but this is originally meant to run on a Jetson TX2, which is waiting for a carrier board. More info at:
This is my code so far:
import numpy as np
import cv2
import sys
import csv
cap = cv2.VideoCapture(0 cv2.CAP_V4L)
cap2 = cv2.VideoCapture(2 cv2.CAP_V4L) # Thermal camera
# CU51 has the following possible resolution settings
# 640 x 480
# 1280 x 720
# 1920 x 1080
# 2592 x 1944
rows = 640
cols = 480
# Set parameters for the camera
cap.set(cv2.CAP_PROP_FRAME_WIDTH, cols)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, rows)
cap.set(cv2.CAP_PROP_CONVERT_RGB, 0) # turn off RGB conversion
cap.set(cv2.CAP_PROP_BRIGHTNESS, 5)
#cap.set(cv2.CAP_PROP_EXPOSURE, 1) #Not Supported
cap.set(cv2.CAP_PROP_FPS, 30)
cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter.fourcc(*'Y16 '))
#out = cv2.VideoWriter('fluorescence_1.raw',fourcc, int(cap.get(5)), (int(cap.get(4)), int(cap.get(3))))
# Grab capture value (into null) and frame
_, frame = cap.read()
# CU51 camera
# convert from 12 bit (4096 levels) to 8 bit (256 levels) 255/4096 = 0.06226
# bf8 = np.array(frame,dtype = np.uint16) # Using unit16 here
bf81 = np.array(frame//16, dtype = np.uint8)
# Create the mask
binary = cv2.imread('Masked_Image.png')
binary = binary[:,:,1]
#_, binary = cv2.threshold(bf81, 30, 255, cv2.THRESH_BINARY)
print('Width = ', cap.get(3),' Height = ', cap.get(4),' fps = ', cap.get(5))
original_stdout = sys.stdout
while True:
_, frame = cap.read()
_, frame2 = cap2.read()
# CU51 camera
# convert from 12 bit (4096 levels) to 8 bit (256 levels) 255/4096 = 0.06226
# bf8 = np.array(frame,dtype = np.uint16) # Using here unit16
bf8 = np.array(frame//16, dtype = np.uint8)
im3 = cv2.bitwise_and(bf8,binary)
im3[binary==0] = 0
# Normalize the image
bf8_2 = cv2.normalize(im3, None, 0.0, 1.0, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F)
# bf8_3 = cv2.normalize(bf8, None, 0.0, 1.0, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F)
bf8_2_color = cv2.applyColorMap(im3, cv2.COLORMAP_JET)
bf8_3_color = cv2.applyColorMap(frame2, cv2.COLORMAP_JET)
cv2.imwrite('Masked_Image.png', binary)
# Display the image, print image size and fps and save each frame
#cv2.imshow('Original Frame', frame)
cv2.imshow('Masked_Image', bf8_2)
cv2.imshow("lepton", cv2.resize(bf8_3_color, (640, 480)))
cv2.imshow("Opencv Video See3Cam_CU51 Color", bf8_2_color)
#cv2.imshow('Opencv Video See3Cam_CU51', bf8_3)
cv2.imshow('Opencv Binary Image', binary)
print('Pixels =', cv2.countNonZero(im3))
print('Mean =', cv2.mean(bf8_2, im3)[:1])
print('Standard Deviation =', cv2.meanStdDev(bf8_2, im3)[:1])
with open('Results1.csv', 'a') as csvfile:
fieldnames = ['Mean']
writer = csv.DictWriter(csvfile, fieldnames=fieldnames)
#writer.writeheader()
writer.writerow({'Mean': cv2.mean(bf8_2, im3)[:1]})
# detect waitkey of q to quit
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
CodePudding user response:
Solved. See @CrisLuengo comment.