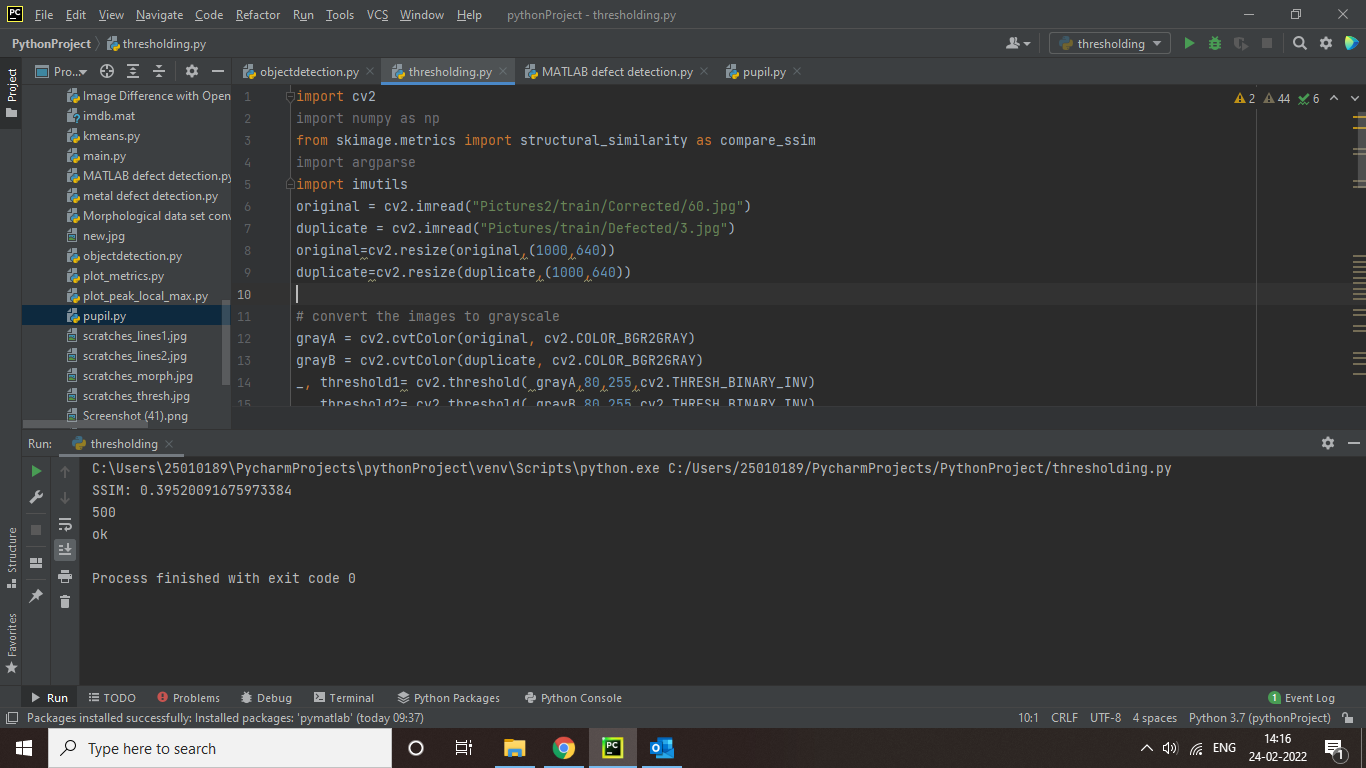
I am trying to run a code for defect detection of gear, whether the bolt in the gear are present or not but facing difficulty to do same.
The code which I am running is facing problem where the SSIM value is coming incorrect for good gear as well as for bad gear.
Moreover if possible, pls tell how it can detect the no. of teeth in gear.
please find the code
import cv2
import numpy as np
from skimage.metrics import structural_similarity as compare_ssim
import argparse
import imutils
original = cv2.imread("Pictures2/train/Corrected/60.jpg")
duplicate = cv2.imread("Pictures/train/Defected/3.jpg")
original=cv2.resize(original,(1000,640))
duplicate=cv2.resize(duplicate,(1000,640))
# convert the images to grayscale
grayA = cv2.cvtColor(original, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(duplicate, cv2.COLOR_BGR2GRAY)
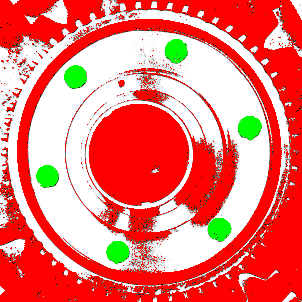
_, threshold1= cv2.threshold( grayA,80,255,cv2.THRESH_BINARY_INV)
_, threshold2= cv2.threshold( grayB,80,255,cv2.THRESH_BINARY_INV)
# compute the Structural Similarity Index (SSIM) between the two
# images, ensuring that the difference image is returned
(score, diff) = compare_ssim(threshold1, threshold2, full=True)
diff = (diff * 255).astype("uint8")
print("SSIM: {}".format(score))
# threshold the difference image, followed by finding contours to
# obtain the regions of the two input images that differ
thresh = cv2.threshold(diff, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
# loop over the contours
#checking similarities using ORB Algorithm
orb= cv2.ORB_create()
kp_1, desc_1= orb.detectAndCompute(threshold1,None)
kp_2, desc_2= orb.detectAndCompute(threshold2,None)
matcher= cv2.BFMatcher(cv2.NORM_HAMMING)
matches=matcher.knnMatch(desc_1,desc_2,k=2)
good=[]
for m,n in matches:
if m.distance<0.7*n.distance:
good.append([m])
final_image=cv2.drawMatchesKnn(threshold1,kp_1,threshold2,kp_2,good,None)
final_image=cv2.resize(final_image,(1000,640))
print(len(matches))
cv2.imshow("matches",final_image)
if score>0.20:
print("ok")
else:
print("not ok")
#cv2.imshow("Original", original)
#cv2.imshow("Duplicate", duplicate)
#cv2.imshow("Difference", difference)
cv2.waitKey(0)
cv2.destroyAllWindows()
i/p image:
Corrected

Defected

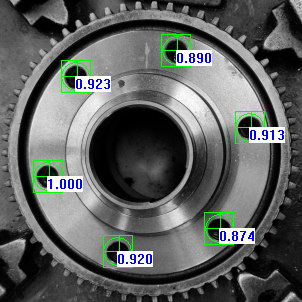
The ss of output

CodePudding user response:
On a binarized image, the missing bolds appear as nice circular shapes that are easy to detect by area and by circularity.
You can also detect the central hole and check the distance.
Another option is template matching with similarity score assessment.
CodePudding user response:
I applied circular matching
import cv2
import numpy as np
# Load image
image = cv2.imread('Pictures2/train/Defected/30.jpg', 0)
image=cv2.resize(image,(1000,640))
# Set our filtering parameters
# Initialize parameter settiing using cv2.SimpleBlobDetector
params = cv2.SimpleBlobDetector_Params()
# Set Area filtering parameters
params.filterByArea = True
params.minArea = 100
# Set Circularity filtering parameters
params.filterByCircularity = True
params.minCircularity = 0.80
# Set Convexity filtering parameters
params.filterByConvexity = True
params.minConvexity = 0.1
# Set inertia filtering parameters
params.filterByInertia = True
params.minInertiaRatio = 0.01
# Create a detector with the parameters
detector = cv2.SimpleBlobDetector_create(params)
# Detect blobs
keypoints = detector.detect(image)
# Draw blobs on our image as red circles
blank = np.zeros((1, 1))
blobs = cv2.drawKeypoints(image, keypoints, blank, (0, 0, 255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
number_of_blobs = len(keypoints)
text = "Number of Circular Blobs: " str(len(keypoints))
cv2.putText(blobs, text, (20, 550),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 100, 255), 2)
# Show blobs
cv2.imshow("Filtering Circular Blobs Only", blobs)
cv2.waitKey(0)
cv2.destroyAllWindows()
But not getting the desired output.
input image

Please find the ss of output image
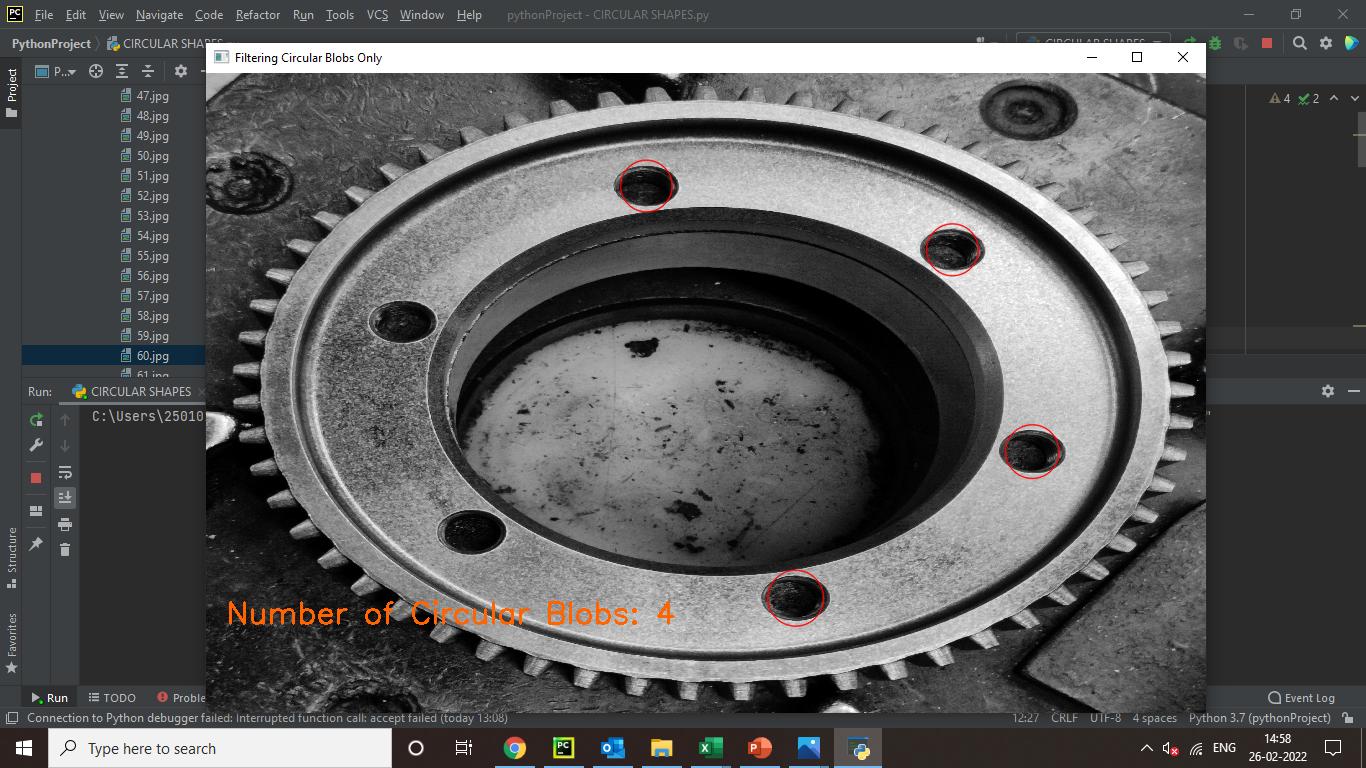
here it should give 6 as output but returned 4. pls help me out
CodePudding user response:
If you use the same setup as the images in the question:
- camera,
- image resolution,
- illumination
Hough Circular Transform might be sufficient after proper smoothing considering reasonable holes dimensions


the code as follows:
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import cv2
import numpy as np
def find_circles(img, min=85, max=100):
equ = cv2.equalizeHist(img)
k_smooth=9 # 9
gauss = cv2.GaussianBlur(equ, (k_smooth, k_smooth), 0) # equ
ret, otsu = cv2.threshold(gauss,0,255,cv2.THRESH_BINARY cv2.THRESH_OTSU)
blur = cv2.medianBlur(otsu, 21)
circles = cv2.HoughCircles(blur,cv2.HOUGH_GRADIENT,1,100,
param1=200,param2=15,minRadius=min,maxRadius=max)
return circles
def draw(img, circles, counter):
res = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
if circles is not None:
idx = 1
for i in circles[0,:]:
# draw the outer circle
cv2.circle(res,(i[0],i[1]),i[2],(0, 0, 255),3)
# draw the center of the circle
cv2.circle(res,(i[0],i[1]),2,(255, 0, 0), 15)
res = cv2.putText(res, str(idx), (i[0] 100,i[1] 100), cv2.FONT_HERSHEY_COMPLEX, 4, (255, 255, 255), 3, cv2.LINE_AA)
idx =1
cv2.namedWindow("There are {} holes without bolts.\n".format(counter), cv2.WINDOW_NORMAL)
cv2.imshow("There are {} holes without bolts.\n".format(counter),res)
cv2.waitKey(0)
cv2.destroyAllWindows()
empty = cv2.imread("empty.jpg", 0)
full = cv2.imread("full.jpg", 0)
img = full
circles = find_circles(img)
if circles is not None:
circles = np.uint16(np.around(circles))
counter = len(circles[0,:])
else:
counter = 0
draw(img, circles, counter)