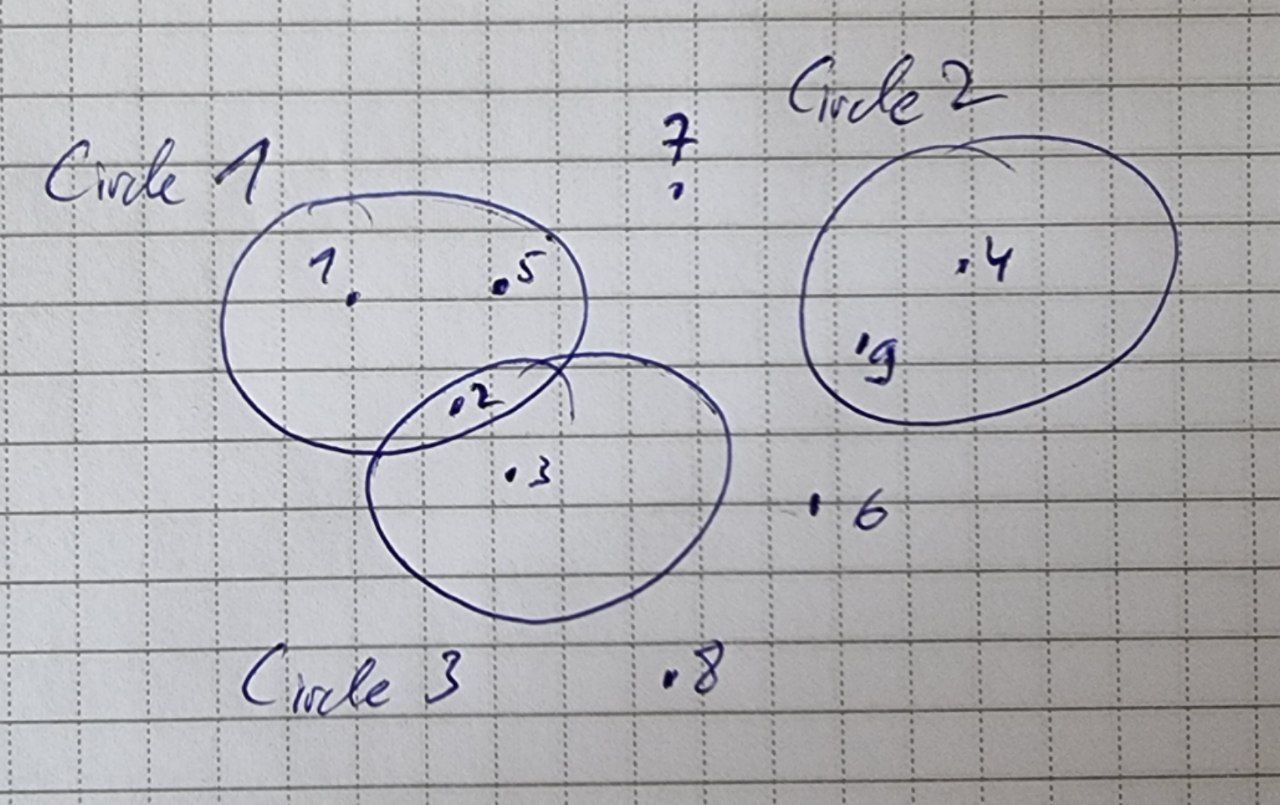
Picture below shows a simple case. Circle 1 is the winner, because it contains points [1, 2, 5] -- more then any other circle.
Naive implementation which checks every point against every circle gives Time Limit. "Use hash" they say. But where?
#include <iostream>
#include <vector>
using namespace std;
struct Point
{
int x;
int y;
};
int64_t dist(Point p1, Point p2)
{
int64_t dx = p1.x - p2.x;
int64_t dy = p1.y - p2.y;
return dx*dx dy*dy;
}
int main()
{
int circle_num;
cin >> circle_num;
vector<Point> circles(circle_num);
vector<int64_t> count (circle_num);
for (Point& p : circles)
cin >> p.x >> p.y;
int points_num;
cin >> points_num;
while (points_num--)
{
Point p;
cin >> p.x >> p.y;
for (int i = 0; i != circle_num; i)
{
if (dist(p, circles[i]) <= 400)
count[i];
}
}
int index = 0;
int64_t max_count = 0;
for (int i = 0; i != circle_num; i)
{
if (count[i] > max_count)
{
max_count = count[i];
index = i;
}
}
cout << (index 1) << endl;
}
Possible input:
3 // number of circles
-1 0 // circle 1 center
1 0 // circle 2 center
2 5 // circle 3 center
3 // number of points
10 0
20 0
22 5
Output: 3 -- circle 3 contains the most number of points
CodePudding user response:
Since the circles are all the same size (800 units), a practical approach is to divide the plane into a grid, with each square 401x401 units, and use a hash from (x,y) -> list to collect the points in each square.
Then for each circle, just check the points in the up to 9 squares that it overlaps.