clear; clc; close all;
Theta1=11.2888956400928; Theta2=9.50268282193131; Theta3=21.4158139249666;
Theta4=0.412975269285272; Theta5=17.7139868990766; Theta6=158.686302955714;
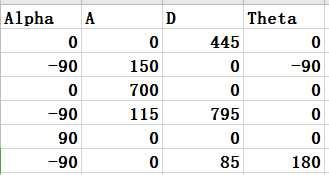
D1=0.445; D2=0; D3=0; D4=0.795; D5=0; D6=0.085;
A0=0; A1=0.150; A2=0.700; A3=0.115; A4=0; A5=0;
Alpha0=0; 1=- 90; Alpha2=0; Alpha3=90; Alpha4=90; Alpha5=90;
% MDH modelT1=[cosd (theta1), - sind (theta1), 0, a0, sind (theta1) * cosd (alpha0), cosd (theta1) * cosd (alpha0), - sind (alpha0), -
D1 * sind (alpha0); Sind (theta1) * sind (alpha0), cosd (theta1) * sind (alpha0), cosd (alpha0), d1 * cosd (alpha0); 0,0,0,1];
T2=[cosd (theta2-90), - sind (theta2-90), a 0, a1; sind cosd (theta2-90) * (1), cosd cosd (theta2-90) * (1), - sind (1), -
D2 * sind (1); Sind sind (theta2-90) * (1), cosd sind (theta2-90) * (1), cosd (1), d2 * cosd (1); 0,0,0,1];
T3=[cosd (theta3), - sind (theta3), 0, a2; sind (theta3) * cosd (alpha2), cosd (theta3) * cosd (alpha2), - sind (alpha2), -
D3 * sind (alpha2); Sind (theta3) * sind (alpha2), cosd (theta3) * sind (alpha2), cosd (alpha2), d3 * cosd (alpha2); 0,0,0,1];
T4=[cosd (theta4), - sind (theta3), 0, a3, sind (theta4) * cosd (alpha3), cosd (theta4) * cosd (alpha3), - sind (alpha3), -
D4 * sind (alpha3); Sind (theta4) * sind (alpha3), cosd (theta4) * sind (alpha3), cosd (alpha3), d4 * cosd (alpha3); 0,0,0,1];
T5=[cosd (theta5), - sind (theta5), 0, a4, sind (theta5) * cosd (alpha4), cosd (theta5) * cosd (alpha4), - sind (alpha4), -
D5 * sind (alpha4); Sind (theta5) * sind (alpha4), cosd (theta5) * sind (alpha4), cosd (alpha4), d5 * cosd (alpha4); 0,0,0,1];
T6=[cosd theta6 (+ 180), - sind (theta6 + 180), a 0, a5; sind theta6 (+ 180) * cosd (alpha5), cosd theta6 (+ 180) * cosd (alpha5), - sind (alpha5), -
D6 * sind (alpha5); Sind sind theta6 (+ 180) * (alpha5), cosd theta6 (+ 180) * sind (alpha5), cosd (alpha5), d6 * cosd (alpha5); 0,0,0,1];
T=T1 * T2 * T5 T4 T3 * * * T6. T=the vpa (t, 8)
Here is to use MATLAB toolbox compiled
clear; clc; close all;
Q=[11.2888956400928, 9.50268282193131, 21.4158139249666, 0.412975269285272, 17.7139868990766, 158.686302955714].
Q=q * PI/180; % perspective into radian
% build industrial robot modelL1=Link ([0 0 0 0 0] 0.445, 'modified');
L2=Link ([- PI/2 0 0-0.15 - PI/2 PI/2], 'modified');
L3=Link ([0 0 0 0 0] 0.7, 'modified');
L4=Link (0.795 0.115 - PI/2 0 0 0], 'modified');
L5=Link ([0 0 0 0 0 PI/2], 'modified');
L6=Link ([PI 0.085 0-0 PI PI/2], 'modified');
Robot=SerialLink ([L1 L2, L3, L4 L5 L6], 'name', 'ABB2600'); % gives the above parameters to robot function
T6=robot. Fkine (q) % six shaft end of the industrial robot pose
DH parameters as shown in figure
New into the small white, the great god, checked two days also don't know what the problem, the result is always two columns, after the first two columns,
CodePudding user response:
I know, a low-level error