I am working on a project that consists of my code recognizing an image of a sudoku puzzle and then solving it. I am working on the image recognition part right now. It was working fine until I realized that I had been making the whole program flipped on the y axis. So I had replaced
dimensions = np.array([[0, 0], [width, 0], [width, height], [0, height]], dtype = "float32")
with
dimensions = np.array([[width, 0], [0, 0], [0, height], [width, height]], dtype = "float32")
This seemed to change everything and now that I run it I just get a grey image. Here is my code. Please note that I am fairly new to opencv. Also, I draw lines in my code and when I run it, the lines still appear. Just the actual image doesn't appear.
#Imports
import cv2 as cv
import numpy as np
import math
#Load image
img = cv.imread('sudoku_test_image.jpeg')
#Transforms perspective
def perspectiveTransform(img, corners):
def orderCornerPoints(corners):
#Corners sperated into their own points
#Index 0 = top-right
# 1 = top-left
# 2 = bottom-left
# 3 = bottom-right
#Corners to points
corners = [(corner[0][0], corner[0][1]) for corner in corners]
add = np.sum(corners)
top_l = corners[np.argmin(add)]
bottom_r = corners[np.argmax(add)]
diff = np.diff(corners, 1)
top_r = corners[np.argmin(diff)]
bottom_l = corners[np.argmax(diff)]
return (top_r, top_l, bottom_l, bottom_r)
ordered_corners = orderCornerPoints(corners)
top_r, top_l, bottom_l, bottom_r = ordered_corners
#Find width of new image (Using distance formula)
width_A = np.sqrt(((bottom_r[0] - bottom_l[0]) ** 2) ((bottom_r[1] - bottom_l[1]) ** 2))
width_B = np.sqrt(((top_r[0] - top_l[0]) ** 2) ((top_r[1] - top_l[1]) ** 2))
width = max(int(width_A), int(width_B))
#Find height of new image (Using distance formula)
height_A = np.sqrt(((top_r[0] - bottom_r[0]) ** 2) ((top_r[1] - bottom_r[1]) ** 2))
height_B = np.sqrt(((top_l[0] - bottom_l[0]) ** 2) ((top_l[1] - bottom_l[1]) ** 2))
height = max(int(height_A), int(height_B))
#Make top down view
#Order: top-right, top-left, bottom-left, bottom-right
dimensions = np.array([[width, 0], [0, 0], [0, height], [width, height]], dtype = "float32")
#Make ordered_corners var numpy format
ordered_corners = np.array(ordered_corners, dtype = 'float32')
#Transform the perspective
m = cv.getPerspectiveTransform(ordered_corners, dimensions)
return cv.warpPerspective(img, m, (width, height))
#Processes image (Grayscale, median blur, adaptive threshold)
def processImage(img):
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
blur = cv.medianBlur(gray, 3)
thresh = cv.adaptiveThreshold(blur,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C, cv.THRESH_BINARY_INV,11,3)
return thresh
#Find and sort contours
img_processed = processImage(img)
cnts = cv.findContours(img_processed, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
cnts = sorted(cnts, key=cv.contourArea, reverse=True)
#Perform perspective transform
peri = cv.arcLength(cnts[0], True)
approx = cv.approxPolyDP(cnts[0], 0.01 * peri, True)
transformed = perspectiveTransform(img, approx)
#Draw lines
height = transformed.shape[0]
width = transformed.shape[1]
#for vertical lines
line_x = 0
x_increment_val = round((1/9) * width)
#for horizontal lines
line_y = 0
y_increment_val = round((1/9) * height)
#vertical lines
for i in range(10):
cv.line(transformed, (line_x, 0), (line_x, height), (0, 0, 255), 1)
line_x = x_increment_val
#horizontal lines
for i in range(10):
cv.line(transformed, (0, line_y), (width, line_y), (0, 0, 255), 1)
line_y = y_increment_val
#Show image
cv.imshow('Sudoku', transformed)
cv.waitKey(0)
cv.destroyAllWindows()
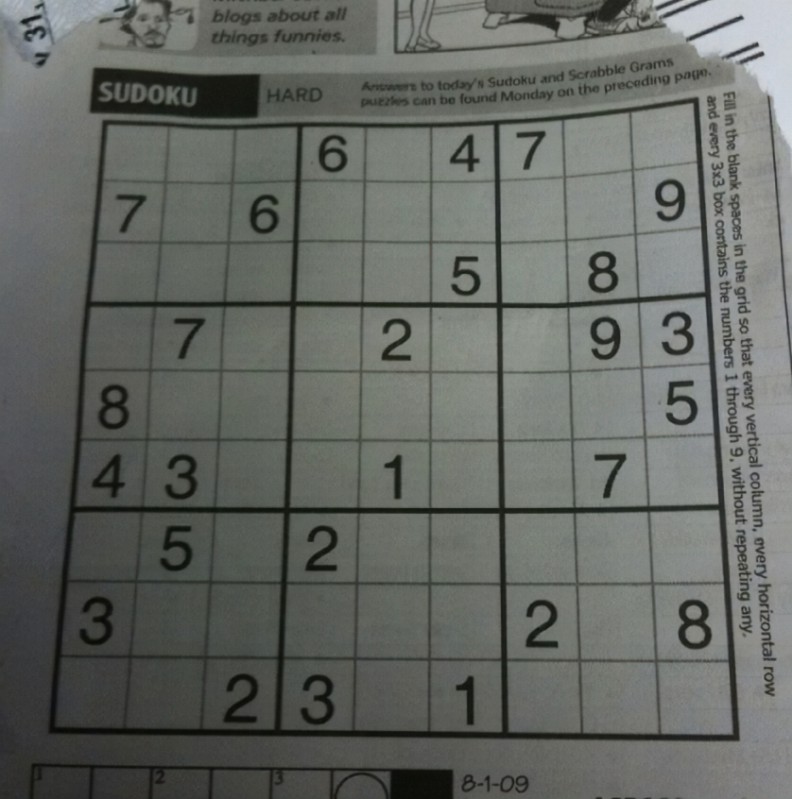
This is my input image
CodePudding user response:
It seems that the input corners are wrongly calculated. Within your perspectiveTransform function, you have the following snippet that apparently calculates the four corners of the Sudoku puzzle:
# Corners to points
corners = [(corner[0][0], corner[0][1]) for corner in corners]
add = np.sum(corners)
top_l = corners[np.argmin(add)]
bottom_r = corners[np.argmax(add)]
diff = np.diff(corners, 1)
top_r = corners[np.argmin(diff)]
bottom_l = corners[np.argmax(diff)]
return (top_r, top_l, bottom_l, bottom_r)
Check the (top_r, top_l, bottom_l, bottom_r) tuple. Those coordinates are wrong, I don't know what you are doing after computing corners, but the top_l, bottom_r, top_r and bottom_l calculations definitely have issues. If you hard code the tuple like this:
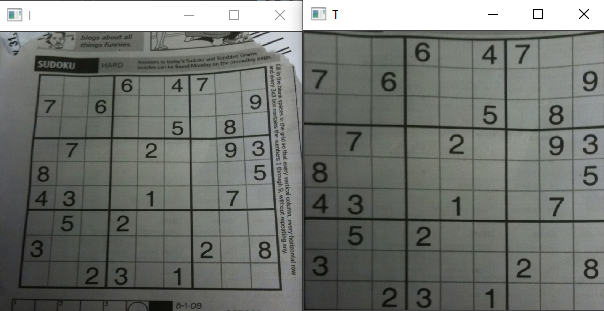
ordered_corners = [(697, 99), (108, 121), (52, 730), (735, 730)] # orderCornerPoints(corners)
To pass where the actual corners (starting top right, anti-clockwise) of the puzzle are, then your transformation is correct:
Advice: When in presence of program bugs, use the debugger and debug step by step to check the actual values of the variables and the intermediate calculations.