I'm looking for a proper solution how to count particles and measure their sizes in this image:
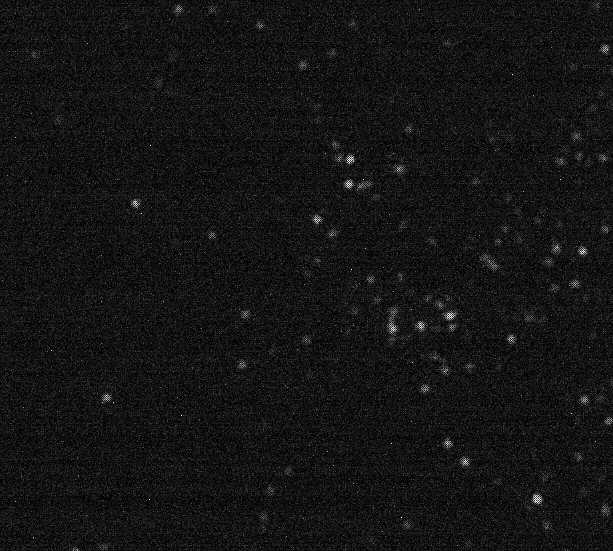
In the end I have to obtain the lists of particles' coordinates and area squares. After some search on the internet I realized there are 3 approaches for particles detection:
- blobs
- Contours
- connectedComponentsWithStats
Looking at different projects I assembled some code with the mix of it.
import pylab
import cv2
import numpy as np
import pylab
Gaussian blurring and thresholding
original_image = cv2.imread(img_path)
img = original_image
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = cv2.GaussianBlur(img, (5, 5), 0)
img = cv2.blur(img, (5, 5))
img = cv2.medianBlur(img, 5)
img = cv2.bilateralFilter(img, 6, 50, 50)
max_value = 255
adaptive_method = cv2.ADAPTIVE_THRESH_GAUSSIAN_C
threshold_type = cv2.THRESH_BINARY
block_size = 11
img_thresholded = cv2.adaptiveThreshold(img, max_value, adaptive_method, threshold_type, block_size, -3)
filter small objects
min_size = 4
nb_components, output, stats, centroids = cv2.connectedComponentsWithStats(img, connectivity=8)
sizes = stats[1:, -1]
nb_components = nb_components - 1
# for every component in the image, you keep it only if it's above min_size
for i in range(0, nb_components):
if sizes[i] < min_size:
img[output == i 1] = 0
generation of Contours for filling holes and measurements. pos_list and size_list is what we were looking for
contours, hierarchy = cv2.findContours(img, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
pos_list = []
size_list = []
for i in range(len(contours)):
area = cv2.contourArea(contours[i])
size_list.append(area)
(x, y), radius = cv2.minEnclosingCircle(contours[i])
pos_list.append((int(x), int(y)))
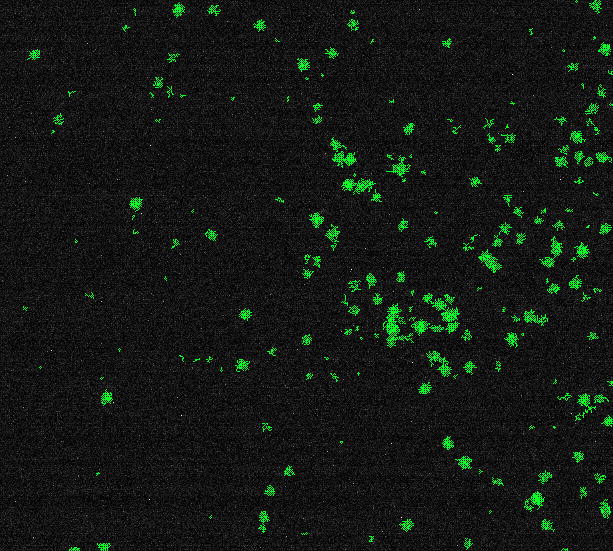
for the self-check, if we plot these coordinates over the original image
pts = np.array(pos_list)
pylab.figure(0)
pylab.imshow(original_image)
pylab.scatter(pts[:, 0], pts[:, 1], marker="x", color="green", s=5, linewidths=1)
pylab.show()
We might get something like the following:
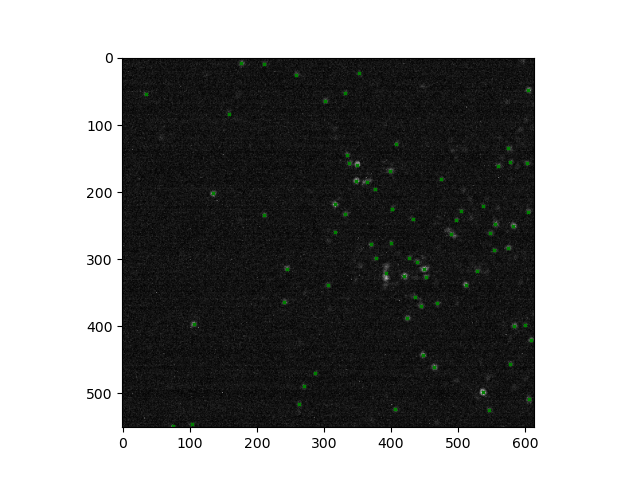
And... I'm not really satisfied with the results. Some clearly visible particles are not included, on the other side, some doubt fluctuations of intensity have been counted. I'm playing now with different filters' settings, but the feeling is it's wrong.
If someone knows how to improve my solution, please share.
CodePudding user response:
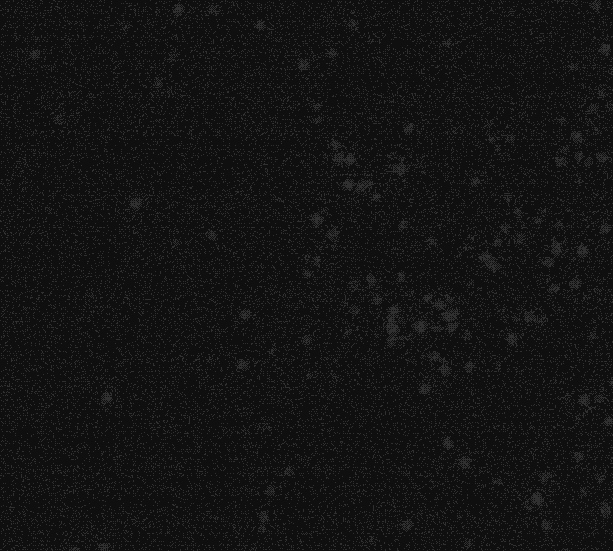
Not an answer, but I need to show an image.
Your grayscale image has all semblance of a Bayer-pattern-encoded one. You should debayerize it.
CodePudding user response:
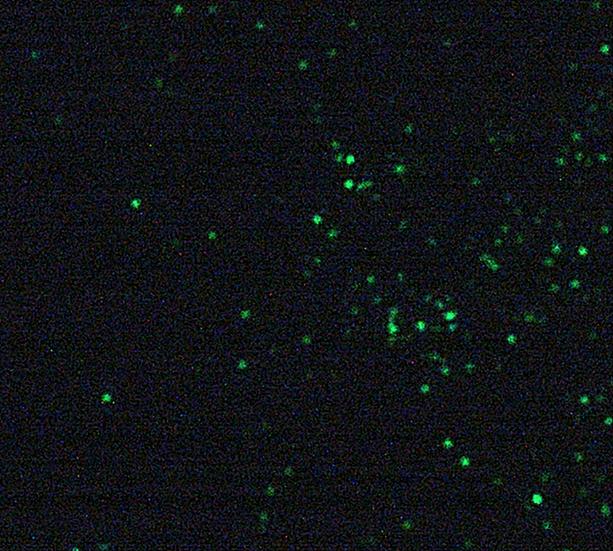
Since the particles are in white and the background in black, we can use Kmeans Color Quantization to segment the image into two groups with cluster=2. This will allow us to easily distinguish between particles and the background. Since the particles may be very tiny, we should try to avoid blurring, dilating, or any morphological operations which may alter the particle contours. Here's an approach:
Kmeans color quantization. We perform Kmeans with two clusters, grayscale, then Otsu's threshold to obtain a binary image.
Filter out super tiny noise. Next we find contours, remove tiny specs of noise using contour area filtering, and collect each particle
(x, y)coordinate and its area. We remove tiny particles on the binary mask by "filling in" these contours to effectively erase them.Apply mask onto original image. Now we bitwise-and the filtered mask onto the original image to highlight the particle clusters.
Kmeans with clusters=2
Result
Number of particles: 204
Average particle size: 30.537
Code
import cv2
import numpy as np
import pylab
# Kmeans
def kmeans_color_quantization(image, clusters=8, rounds=1):
h, w = image.shape[:2]
samples = np.zeros([h*w,3], dtype=np.float32)
count = 0
for x in range(h):
for y in range(w):
samples[count] = image[x][y]
count = 1
compactness, labels, centers = cv2.kmeans(samples,
clusters,
None,
(cv2.TERM_CRITERIA_EPS cv2.TERM_CRITERIA_MAX_ITER, 10000, 0.0001),
rounds,
cv2.KMEANS_RANDOM_CENTERS)
centers = np.uint8(centers)
res = centers[labels.flatten()]
return res.reshape((image.shape))
# Load image
image = cv2.imread('1.png')
original = image.copy()
# Perform kmeans color segmentation, grayscale, Otsu's threshold
kmeans = kmeans_color_quantization(image, clusters=2)
gray = cv2.cvtColor(kmeans, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)[1]
# Find contours, remove tiny specs using contour area filtering, gather points
points_list = []
size_list = []
cnts, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2:]
AREA_THRESHOLD = 2
for c in cnts:
area = cv2.contourArea(c)
if area < AREA_THRESHOLD:
cv2.drawContours(thresh, [c], -1, 0, -1)
else:
(x, y), radius = cv2.minEnclosingCircle(c)
points_list.append((int(x), int(y)))
size_list.append(area)
# Apply mask onto original image
result = cv2.bitwise_and(original, original, mask=thresh)
result[thresh==255] = (36,255,12)
# Overlay on original
original[thresh==255] = (36,255,12)
print("Number of particles: {}".format(len(points_list)))
print("Average particle size: {:.3f}".format(sum(size_list)/len(size_list)))
# Display
cv2.imshow('kmeans', kmeans)
cv2.imshow('original', original)
cv2.imshow('thresh', thresh)
cv2.imshow('result', result)
cv2.waitKey()