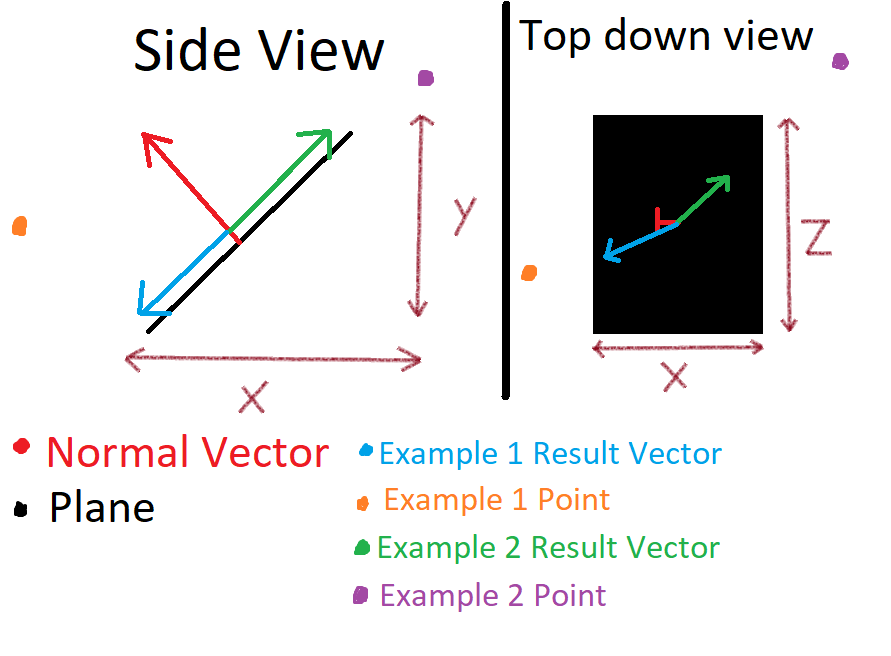
I want to calculate a vector that is perpendicular to a normal vector of a plane, and if you are looking at the plane top down you will see the resulting vector pointing towards a point.
Example Image:
What I've tried
This is the code I've made to try to calculate the vector. It doesn't work not sure what to add to fix it.
int sgn(float val) {
return (0.0f < val) - (val < 0.0f);
}
void DetermineVector(Vector3 normalVector, Vector3 hitPosition, Vector3 goalPoint) {
float deltaX = goalPoint.X - hitPosition.X; // TO - FROM
float deltaY = goalPoint.Y - hitPosition.Y; // TO - FROM
float deltaZ = goalPoint.Z - hitPosition.Z; // TO - FROM
// Determine the x, z components of the vector.
// Basic Pythagorean Theorem
float length = sqrt(deltaX * deltaX deltaZ * deltaZ);
float x = deltaX / length;
float z = deltaZ / length;
// Determine the y component of the vector;
// Gets the sign of angle rotation
float crossProductSum = -normalVector.X * deltaY normalVector.Y * deltaX;
int sign = sgn(crossProductSum); // Gets the sign -1, 0, and 1
// Use trigonometry to figure out the angle of the normal vector in relation to the UP vector (0, 1, 0)
// take that angle and subtract rotate 90 and take that resulting y vector and multiply the sign
float angle = acos(normalVector.Y);
float y = cos(angle - 90) * sign;
// We have to combine the components so that the Y component is the same because its already normalized
// But we have to normalize the x, z components based on the Y component
return Vector3(x / (1 - y), y, z / (1 - y));
}
CodePudding user response:
In other words you're seeking a vector from hitPosition towards the projection of goalPoint along the Y axis. You don't need trigonometry for this.
A vector (X,Y,Z) is perpendicular to the normal of the plane if it satisfies:
X*normalVector.X Y*normalVector.Y Z*normalVector.Z == 0
(See dot product.)
That vector points towards the projection of goalPoint along Y axis if
X = deltaX
Z = deltaZ
Substituting and solving for Y:
Y = -(deltaX*normalVector.X deltaZ*normalVector.Z)/normalVector.Y
You can normalize the result at the end if needed.
Putting it all together:
Vector3 DetermineVector(Vector3 normalVector, Vector3 hitPosition, Vector3 goalPoint) {
float deltaX = goalPoint.X - hitPosition.X; // TO - FROM
float deltaY = goalPoint.Y - hitPosition.Y; // TO - FROM
float deltaZ = goalPoint.Z - hitPosition.Z; // TO - FROM
float X = deltaX;
float Y = -(deltaX*normalVector.X deltaZ*normalVector.Z)/normalVector.Y;
float Z = deltaZ;
// optionally normalize:
float length = sqrt(X*X Y*Y Z*Z);
X /= length, Y /= length, Z /= length;
return Vector3(X, Y, Z);
}