Outline
I have a calibrated stereo camera setup with the 11 DLT coefficients for each camera (coefficients estimated using the 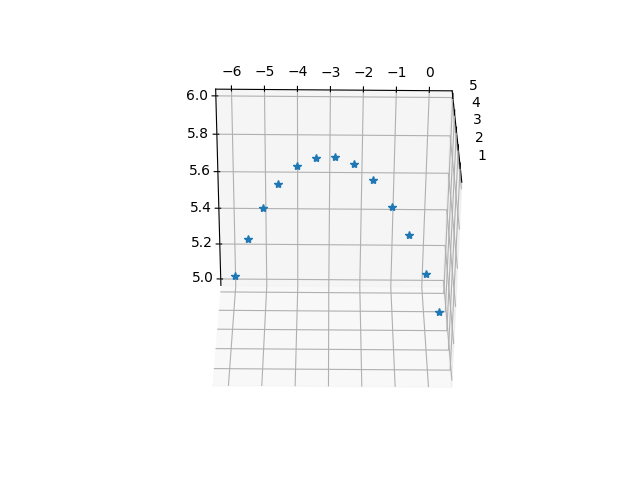
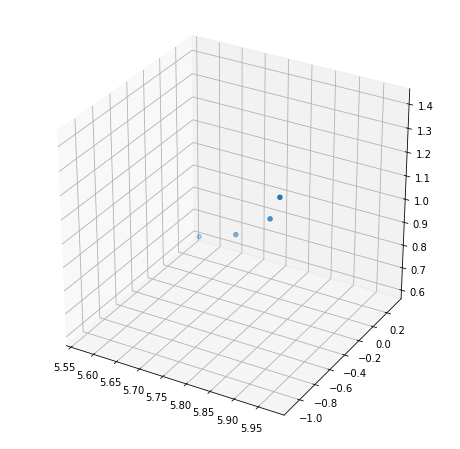
Obtained parabolic trajectory of a thrown object using DLT triangulation (plot has been rotated to align with gravity)
However, when I convert the DLT coefficients into a Projection matrix (P, where x = P X, where x is the 2d pixel coordinates, P is a 3x4 matrix and X is a homogenous 4x1 matrix with object 3d coordinates included) - the 'shape' of the trajectory makes sense but the values don't (values close to ~0.01 for x,y,z).
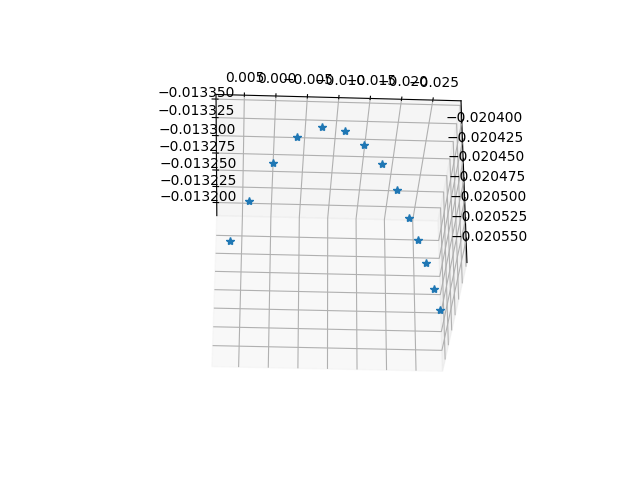
Obtained trajectory using Projection matrix based method cv2.triangulatePoints(plot has been rotated to align with gravity)
Can anyone please explain why the Projection matrix based method produces oddly scaled coordinates or what is being done wrong here?
The discrepancy doesn't make sense as the DLT coefficients and projection matrix are inter-convertible (e.g. see