I would like to explore the functionality of the GEKKO web GUI for visualising results as described in 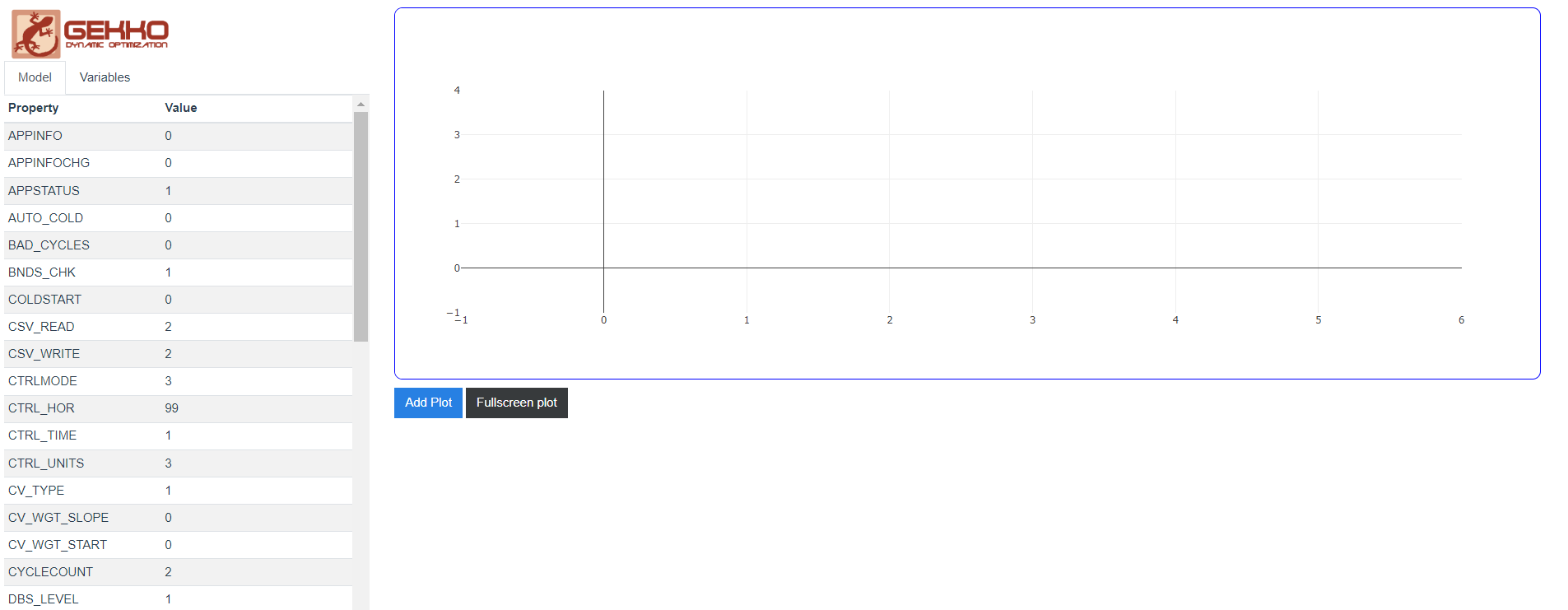
CodePudding user response:
The Gekko display version is with GUI=True as is shown by the plot in your question. Only FV, MV, SV, and CV values display in the web interface.
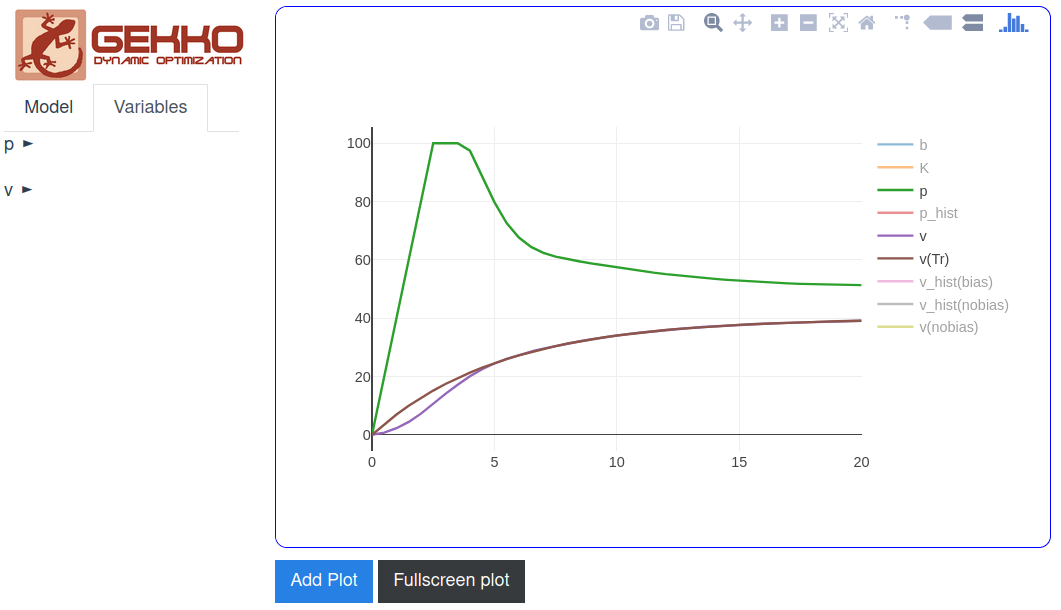
Edit: As noted in your comment, you resolved the lack of trend display by upgrading flask.
pip install flask --upgrade
The option WEB is the APMonitor version of the web-interface that uses AJAX and Flash plots (deprecated, to be replaced in a future version) to display the web interface. This can remain as m.options.WEB=0 to use the Gekko GUI.
Below is an example that generates the web-interface. The flask package is a dependency for the web-interface and the web-page needs to be refreshed the first time it is launched. Select the variables on the plot to display or add a new plot.
from gekko import GEKKO
import numpy as np
import matplotlib.pyplot as plt
m = GEKKO()
m.time = np.linspace(0,20,41)
# Parameters
mass = 500
b = m.Param(value=50)
K = m.Param(value=0.8)
# Manipulated variable
p = m.MV(value=0, lb=0, ub=100)
p.STATUS = 1 # allow optimizer to change
p.DCOST = 0.1 # smooth out gas pedal movement
p.DMAX = 20 # slow down change of gas pedal
# Controlled Variable
v = m.CV(value=0)
v.STATUS = 1 # add the SP to the objective
m.options.CV_TYPE = 2 # squared error
v.SP = 40 # set point
v.TR_INIT = 1 # set point trajectory
v.TAU = 5 # time constant of trajectory
# Process model
m.Equation(mass*v.dt() == -v*b K*b*p)
m.options.IMODE = 6 # control
m.solve(disp=False,GUI=True)
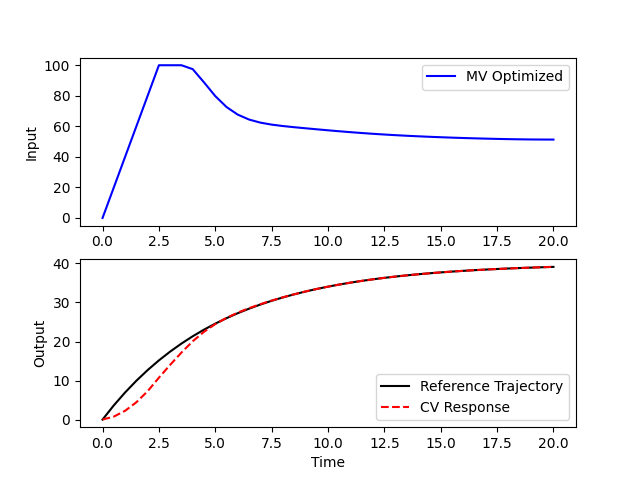
Calling m.solve(GUI=True) generates (or updates) the web-interface with each call. It is also possible to display the MPC solution with Matplotlib.
# get additional solution information
import json
with open(m.path '//results.json') as f:
results = json.load(f)
plt.figure()
plt.subplot(2,1,1)
plt.plot(m.time,p.value,'b-',label='MV Optimized')
plt.legend()
plt.ylabel('Input')
plt.subplot(2,1,2)
plt.plot(m.time,results['v1.tr'],'k-',label='Reference Trajectory')
plt.plot(m.time,v.value,'r--',label='CV Response')
plt.ylabel('Output')
plt.xlabel('Time')
plt.legend(loc='best')
plt.show()
More complicated Matplotlib plots can also be generated to show a future prediction horizon, moving horizon estimation, or other customized features of the MPC solution.