I have this image of a pin header, and I need to detect if there are bent pins in the header using OpenCV.
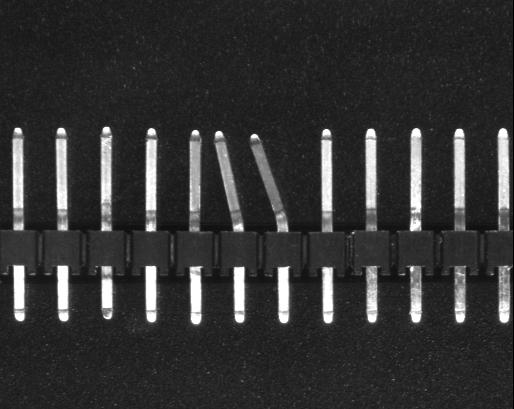
What is the best way to do this!? I have made the following so far. But I'm not sure if this is the correct way of doing it.
I use Canny edge detection and then HoughLinesP to check for lines.
for (const auto &entry: fs::directory_iterator(SAMPLES)) {
try {
// Load src image
src = imread(entry.path(), IMREAD_COLOR);
cvtColor(src, gray, COLOR_BGR2GRAY);
// blur(gray, blurMat, Size(3, 3));
cropped = gray(Range(150,230), Range(0, gray.cols));
// Edge detection
Canny(cropped, detected_edges, thres1, thres2, 3);
imshow("cropped", cropped);
imshow("src", src);
imshow("detected_edges", detected_edges);
// Probabilistic Line Transform
vector<Vec4i> linesP; // will hold the results of the detection
HoughLinesP(detected_edges, linesP, 1, CV_PI/180, 20, 50, 10 ); // runs the actual detection
// Draw the lines
for( size_t i = 0; i < linesP.size(); i )
{
Vec4i l = linesP[i];
line( src, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 3, LINE_AA);
}
imshow(entry.path().filename(), src);
waitKey();
} catch (const std::exception &e) {
cout << e.what() << endl;
}
}
The output looks like this then:

So in theory I only have to check if the angle of a line is greater than some threshold. But Maybe I got it all wrong. I like to hear from you.
CodePudding user response:
Have a look at cv::findContours.
You should be able to extract the pins with that, maybe binarize first with cv::threshold(). Then using center-of-mass and the moment-of-area for the contours found, you can describe the position and angle of the pins. Or just using the bounding rectangle might even be enough.
CodePudding user response:
Here is my approach with code and results.
Steps to produce:
(preprocessing)
- Apply median to decrease noise in the image
- Apply threshold to get a clear image
Here is the result of these 2 steps:
(there is a server error but i will add image later)
- Check each row and get the sticks according to the thickness threshold.
Result image of this step:
(there is a server error but i will add image later)
- Get mid point's y axis values of each stick and hold in an array.
- Calculate the standard deviation of each array and choose the ones which are higher.
Here is the code:
#include <string>
#include <opencv2/opencv.hpp>
#include <opencv2/dnn_superres.hpp>
#include <numeric>
#include <boost/accumulators/accumulators.hpp>
#include <boost/accumulators/statistics/stats.hpp>
#include <boost/accumulators/statistics/mean.hpp>
#include <boost/accumulators/statistics/moment.hpp>
using namespace boost::accumulators;
using namespace std;
using namespace boost;
double stddev(std::vector<int> const & func)
{
double mean = std::accumulate(func.begin(), func.end(), 0.0) / func.size();
double sq_sum = std::inner_product(func.begin(), func.end(), func.begin(), 0.0,
[](double const & x, double const & y) { return x y; },
[mean](double const & x, double const & y) { return (x - mean)*(y - mean); });
return std::sqrt(sq_sum / func.size());
}
int main(){
cv::Mat img = cv::imread("/home/yns/Downloads/aaa.jpg",cv::IMREAD_GRAYSCALE);
cv::namedWindow("input",0);
cv::namedWindow("output",0);
cv::namedWindow("output2",0);
cv::imshow("input",img);
cv::Mat out;
cv::medianBlur(img,img,3);
cv::threshold(img,out,80,255,cv::THRESH_BINARY);
cv::Mat out2;
cv::cvtColor(out,out2,cv::COLOR_GRAY2BGR);
cv::imshow("output",out);
int start = 0;
int cnt = 0;
int refX = 0;
int thresholdThickness = 5;
int orderNum = 1;
std::vector<int> yAxis_1;
std::vector<int> yAxis_2;
std::vector<int> yAxis_3;
std::vector<int> yAxis_4;
std::vector<int> yAxis_5;
std::vector<int> yAxis_6;
std::vector<int> yAxis_7;
std::vector<int> yAxis_8;
std::vector<int> yAxis_9;
std::vector<int> yAxis_10;
std::vector<int> yAxis_11;
std::vector<int> yAxis_12;
int annen = 0;
for(int i=0; i<out.rows; i )
{
orderNum = 1;
annen = 0;
for(int j=0; j<out.cols; j )
{
if(out.at<uchar>(cv::Point(j,i))==255 && start != 1)
{
start = 1;
refX = j;
cnt = 0;
}
else if (out.at<uchar>(cv::Point(j,i))==255)
{
cnt ;
}
else if (out.at<uchar>(cv::Point(j,i))==0 && start == 1 && cnt>thresholdThickness) {
cv::circle(out2,cv::Point((j refX)/2,i),1,cv::Scalar(0,0,255),cv::FILLED);
start = 0;
annen ;
if(orderNum == 1)
yAxis_1.push_back(j);
if(orderNum == 2)
yAxis_2.push_back(j);
if(orderNum == 3)
yAxis_3.push_back(j);
if(orderNum == 4)
yAxis_4.push_back(j);
if(orderNum == 5)
yAxis_5.push_back(j);
if(orderNum == 6)
yAxis_6.push_back(j);
if(orderNum == 7)
yAxis_7.push_back(j);
if(orderNum == 8)
yAxis_8.push_back(j);
if(orderNum == 9)
yAxis_9.push_back(j);
if(orderNum == 10)
yAxis_10.push_back(j);
if(orderNum == 11)
yAxis_11.push_back(j);
if(orderNum == 12)
yAxis_12.push_back(j);
orderNum ;
}
else if (out.at<uchar>(cv::Point(j,i))==0 && start == 1)
{
start = 0;
}
}
}
std::cout<<stddev(yAxis_1)<<std::endl;
std::cout<<stddev(yAxis_2)<<std::endl;
std::cout<<stddev(yAxis_3)<<std::endl;
std::cout<<stddev(yAxis_4)<<std::endl;
std::cout<<stddev(yAxis_5)<<std::endl;
std::cout<<stddev(yAxis_6)<<std::endl;
std::cout<<stddev(yAxis_7)<<std::endl;
std::cout<<stddev(yAxis_8)<<std::endl;
std::cout<<stddev(yAxis_9)<<std::endl;
std::cout<<stddev(yAxis_10)<<std::endl;
std::cout<<stddev(yAxis_11)<<std::endl;
std::cout<<stddev(yAxis_12)<<std::endl;
float average = accumulate( yAxis_6.begin(), yAxis_6.end(), 0.0)/yAxis_6.size();
float average2 = accumulate( yAxis_7.begin(), yAxis_7.end(), 0.0)/yAxis_7.size();
cv::circle(out2,cv::Point(average,out2.rows/2),25,cv::Scalar(0,255,255),5);
cv::circle(out2,cv::Point(average2,out2.rows/2),25,cv::Scalar(0,255,255),5);
cv::imshow("output2",out2);
cv::waitKey(0);
return 0;
}