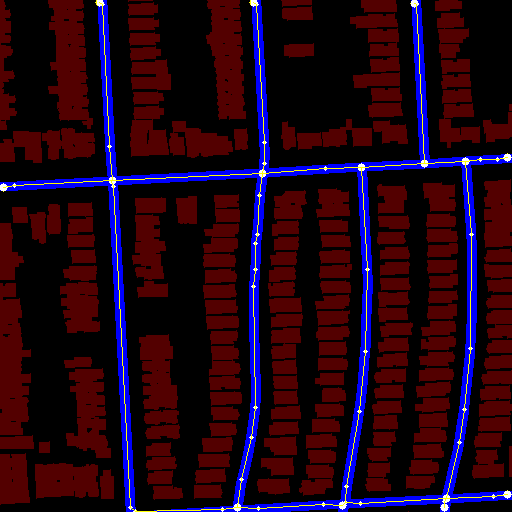
I have a 512x512 image of a street grid:
I'd like to extract polylines for each of the streets in this image (large blue dots = intersections, small blue dots = points along polylines):

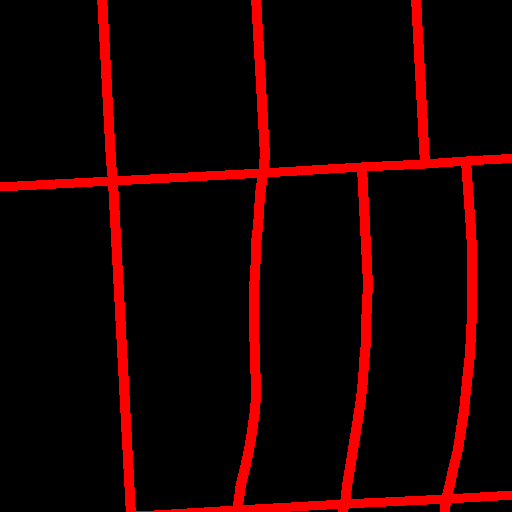
I've tried a few techniques! One idea was to start with 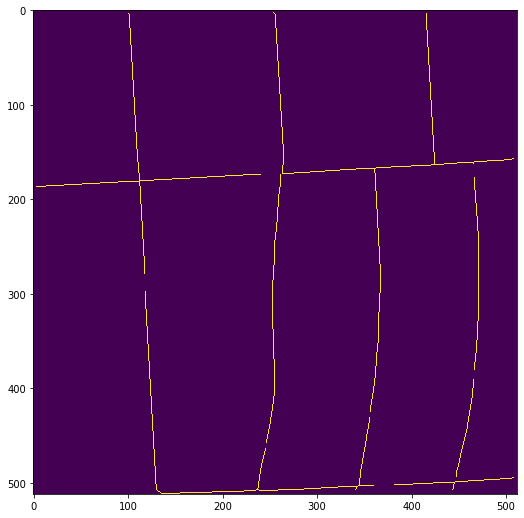
Unfortunately this has some gaps that break the connectivity of the street network; I'm not entirely sure why, but my guess is that this is because some of the streets are 1px narrower in some places and 1px wider in others. (update: the gaps aren't real; they're entirely artifacts of how I was displaying the skeleton. See 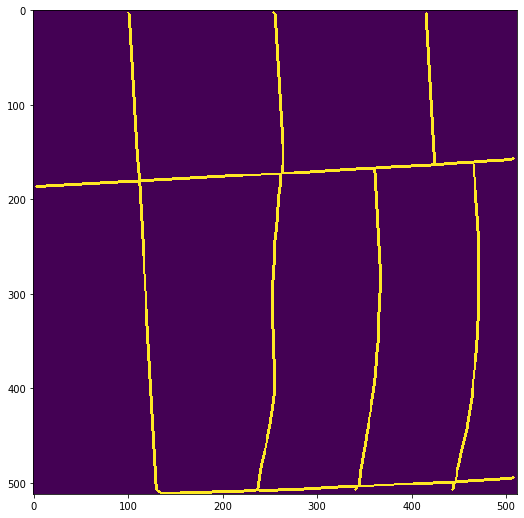
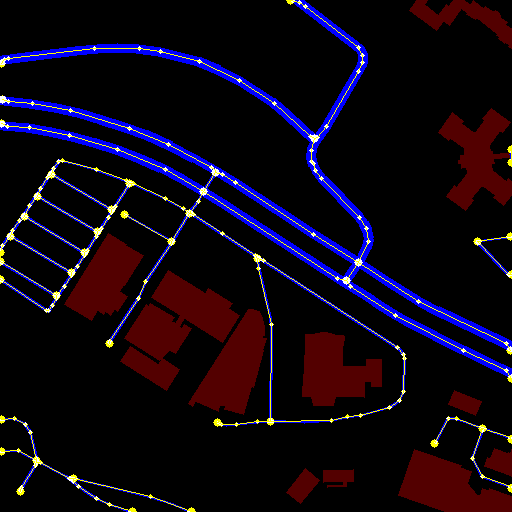
With a re-connected grid, I can run the Hough transform to find line segments:
import cv2
rho = 1 # distance resolution in pixels of the Hough grid
theta = np.pi / 180 # angular resolution in radians of the Hough grid
threshold = 8 # minimum number of votes (intersections in Hough grid cell)
min_line_length = 10 # minimum number of pixels making up a line
max_line_gap = 2 # maximum gap in pixels between connectable line segments
# Run Hough on edge detected image
# Output "lines" is an array containing endpoints of detected line segments
lines = cv2.HoughLinesP(
out, rho, theta, threshold, np.array([]),
min_line_length, max_line_gap
)
line_image = streets_data.copy()
for i, line in enumerate(lines):
for x1,y1,x2,y2 in line:
cv2.line(line_image,(x1,y1),(x2,y2), 2, 1)
This produces a whole jumble of overlapping line segments, along with some gaps (look at the T intersection on the right side):
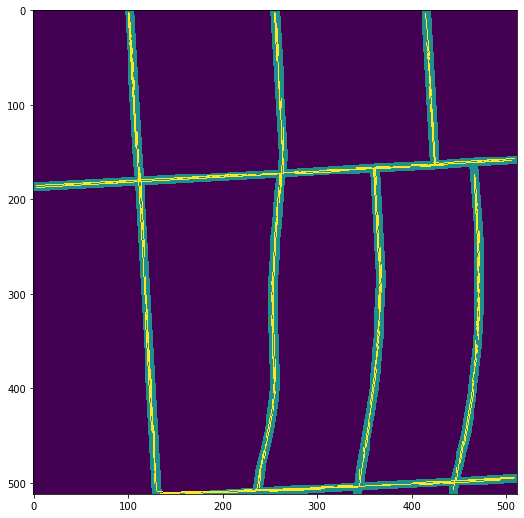
At this point I could try to de-dupe overlapping line segments, but it's not really clear to me that this is a path towards a solution, especially given that gap.
Are there more direct methods available to get at the network of polylines I'm looking for? In particular, what are some methods for:
- Finding the intersections (both four-way and T intersections).
- Shrinking the streets to all be 1px wide, allowing that there may be some variable width.
- Finding the polylines between intersections.
CodePudding user response:
If you want to improve your "skeletonization", you could try the following algorithm to obtain the "1-px wide streets":
import imageio
import numpy as np
from matplotlib import pyplot as plt
from scipy.ndimage import distance_transform_edt
from skimage.segmentation import watershed
# read image
image_rgb = imageio.imread('1mYBD.png')
# convert to binary
image_bin = np.max(image_rgb, axis=2) > 0
# compute the distance transform (only > 0)
distance = distance_transform_edt(image_bin)
# segment the image into "cells" (i.e. the reciprocal of the network)
cells = watershed(distance)
# compute the image gradients
grad_v = np.pad(cells[1:, :] - cells[:-1, :], ((0, 1), (0, 0)))
grad_h = np.pad(cells[:, 1:] - cells[:, :-1], ((0, 0), (0, 1)))
# given that the cells have a constant value,
# only the edges will have non-zero gradient
edges = (abs(grad_v) > 0) (abs(grad_h) > 0)
# extract points into (x, y) coordinate pairs
pos_v, pos_h = np.nonzero(edges)
# display points on top of image
plt.imshow(image_bin, cmap='gray_r')
plt.scatter(pos_h, pos_v, 1, np.arange(pos_h.size), cmap='Spectral')

The algorithm works on the "blocks" rather than the "streets", take a look into the cells image:

CodePudding user response:
I was on the right track with skeleton; it does produce a connected, 1px wide version of the street grid. It's just that there was a bug in my display code (see 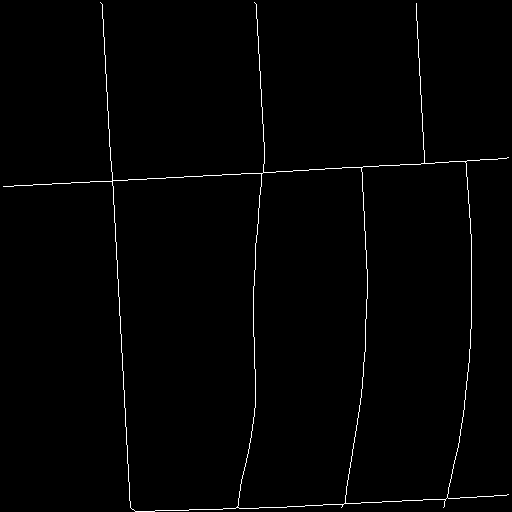
From here the reference to