I'm currently studying the basics of GIS with R at this 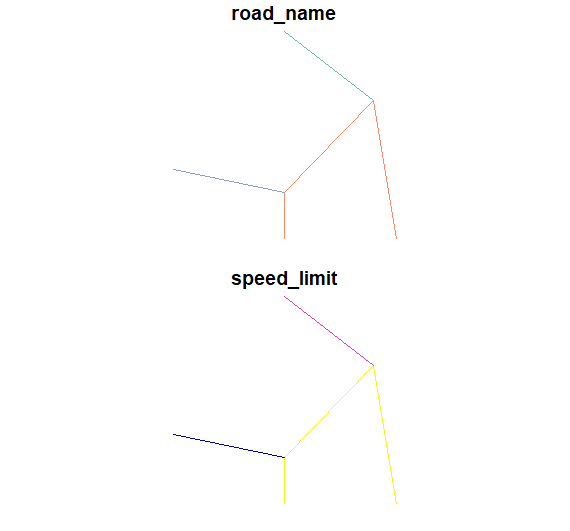
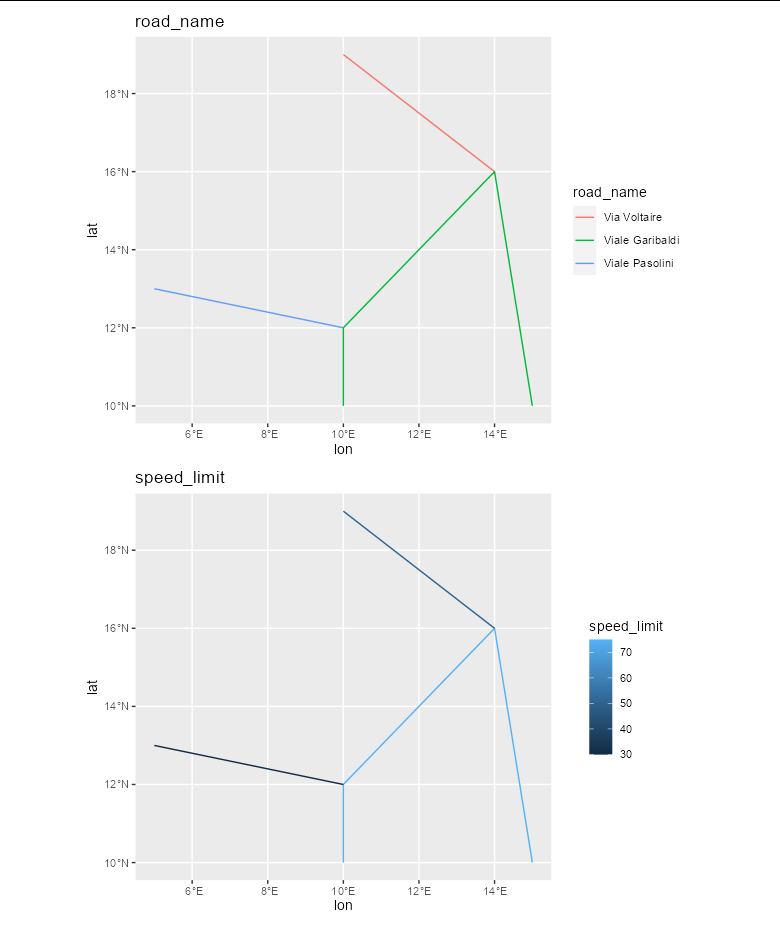
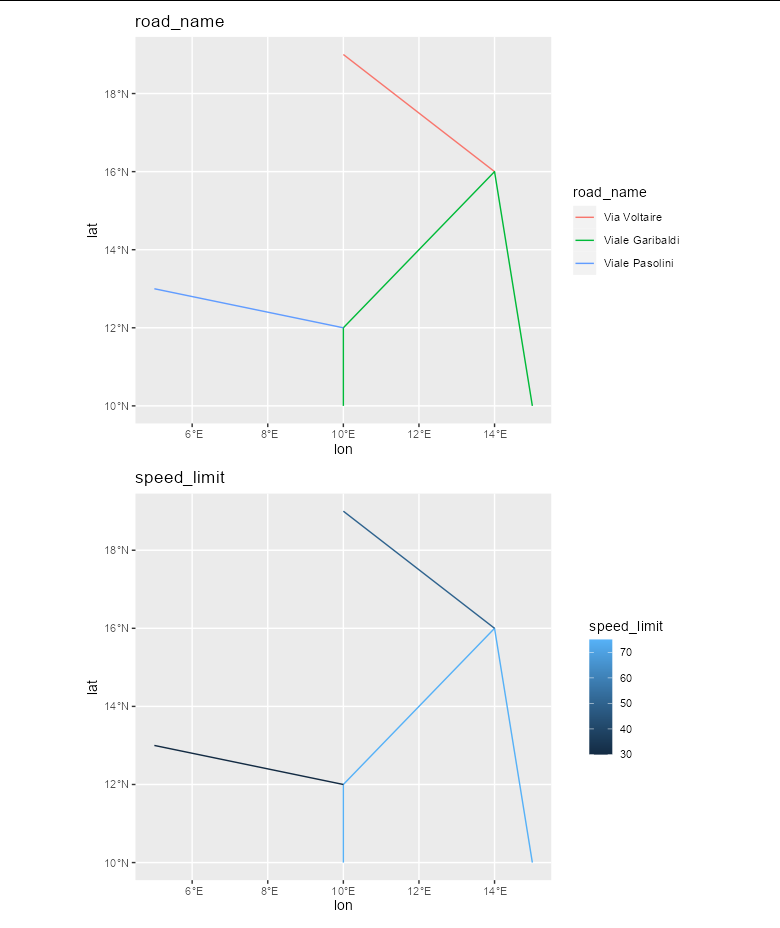
But when I use ggplot2 and ggspatial packages, a 4th line is added to speed_limit plot, and I really don't know why.
sp_df <- ggspatial::df_spatial(line_sf)
p1 <- ggplot2::ggplot(sp_df, aes(x,y))
ggspatial::geom_spatial_path(aes(colour = road_name))
ggspatial::coord_sf(crs = 4326)
xlab("lon")
ylab("lat")
ggtitle("road_name")
p2 <- ggplot2::ggplot(sp_df, aes(x,y))
ggspatial::geom_spatial_path(aes(color = speed_limit))
ggspatial::coord_sf(crs = 4326)
xlab("lon")
ylab("lat")
ggtitle("speed_limit")
p1 / p2
What's the problem here? Where that additional line comes from? Am I doing something wrong or is this a bug? Any help is appreciated.
CodePudding user response:
You seem to be doing things the hard way, since ggplot has excellent sf support. Rather than loading an extra dependency, using extra code and converting to a data frame, why not simply plot the sf object directly?
p1 <- ggplot(line_sf)
geom_sf(aes(geometry = line_sfc, color = road_name))
labs(title = "road_name", x = "lon", y = "lat")
p2 <- ggplot(line_sf)
geom_sf(aes(geometry = line_sfc, color = speed_limit))
labs(title = "speed_limit", x = "lon", y = "lat")
p1 / p2
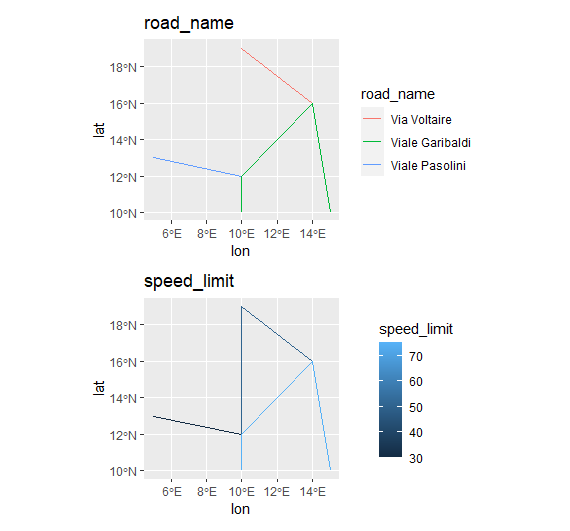
If you have good reasons for converting to a data frame, the alternative is to group the second plot by road name so that adjacent groups aren't connected:
sp_df <- ggspatial::df_spatial(line_sf)
p1 <- ggplot2::ggplot(sp_df, aes(x,y))
ggspatial::geom_spatial_path(aes(colour = road_name))
ggspatial::coord_sf(crs = 4326)
xlab("lon")
ylab("lat")
ggtitle("road_name")
ggplot2::ggplot(sp_df, aes(x,y))
ggspatial::geom_spatial_path(aes(color = speed_limit, group = road_name))
ggspatial::coord_sf(crs = 4326)
xlab("lon")
ylab("lat")
ggtitle("speed_limit")
p1 / p2