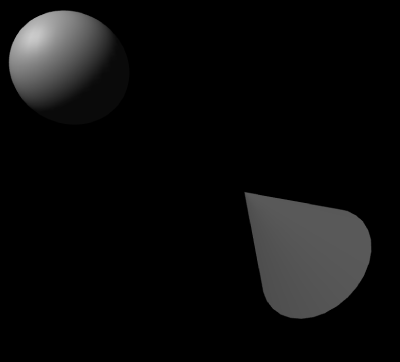
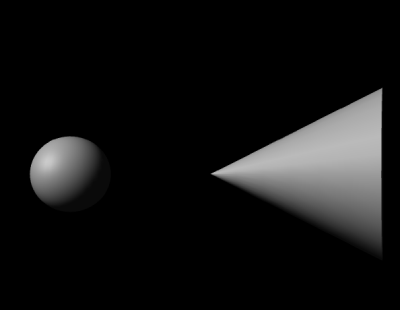
I have two objects one sphere and a cone. I want cone to always face the sphere as shown in the images.
we have constructed the cone in local coordinate system in such a way, that the tip of the cone points upward the y-axis and the center is at the origin (0,0,0).
The angle between two 3D vectors would be
float fAngle = std::acos(dot(sphereVector, coneVector) / magnitude(sphereVector * magnitude(coneVector)));
For cone to be always facing the sphere it need to be rotated in all three axis based on the position of the sphere but i am getting only one angle from the maths formula.
How do i calculate all the three angles for the cone that it is always perpendicular to the sphere.
CodePudding user response:
First, you need the vector where the cone should point to:
direction = center_cone - center_sphere;
Then, we assume, that you've constructed your cone in the local coordinate system in such a way, that the tip of the cone points upward the y-axis and the center is at the origin (0,0,0).
The axises to rotate are:
x_axis(1, 0, 0);
y_axis(0, 1, 0);
z_axis(0, 0, 1);
Now, you simply have to project the axises to the direction vector to get the 3 angles.
Example:
float angle(vec a, vec b)
{
return acos(dot(a, b) / (magnitude(a) * magnitude(b)));
}
vec direction = normalize(center_cone - center_sphere);
float x_rot = angle(x_axis, direction);
float y_rot = angle(y_axis, direction);
float z_rot = angle(z_axis, direction);