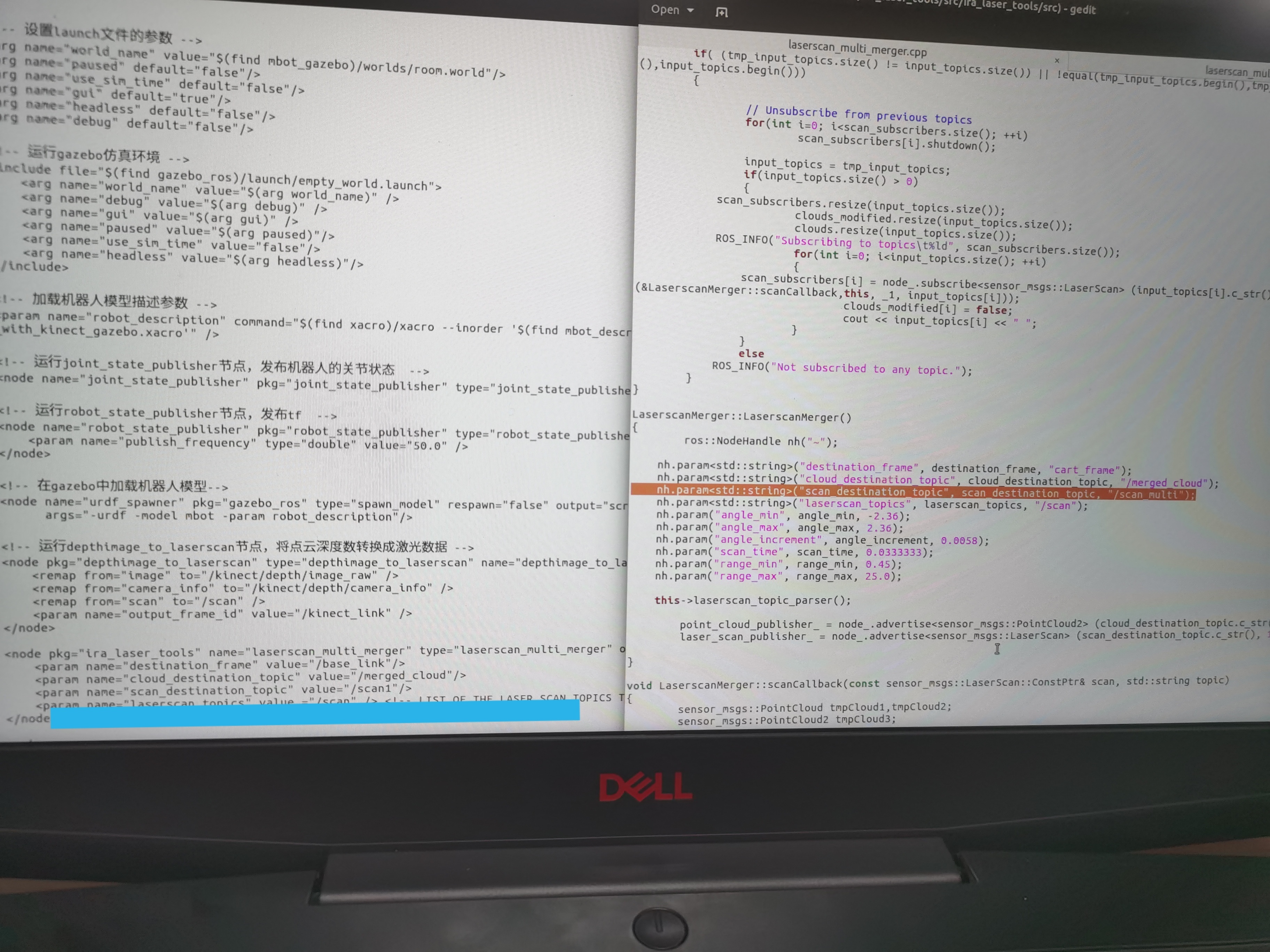
Ask a question about parameters, I inside the launch file defines the value of a scan_destination_topic scan1, then nodes defined in the internal scan_multi, I found after carry out the launch file issued titled scan1. There should be no problem, then I put inside the launch about scan_destination_topic delete, save after restart why topic or scan1? This time I don't have the parameter on the outside of the node to the words it should not be invoked inside? Why still use the former parameters used by a program? Note: when I changed scan1 to scan2 also will change as scan2 release topic, just don't understand why delete assignment after do not use the internal parameters,