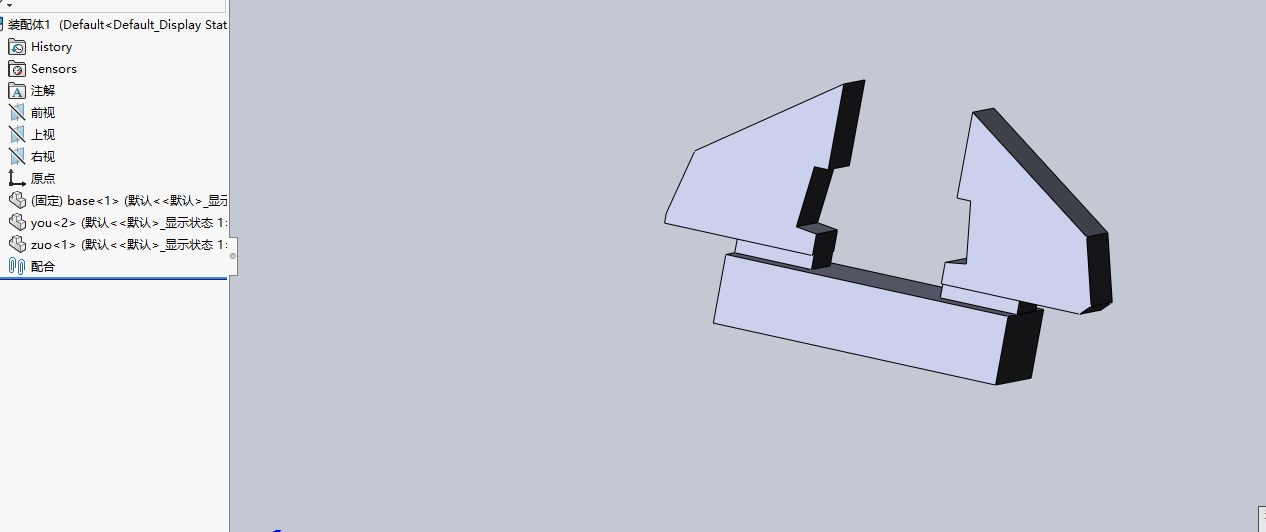
My finger grip is pneumatic clamping jaw, is a translational joint opening and closing, should the export two joints, connecting rod, three of her datum axis and coordinate system should be how to add, this is my 3 d diagram grip, a base, two knuckles