Equipment: ur5 mechanical arm & amp; IntelRealsense D435 depth camera
Using easy_handeye package for the hand-eye calibration of the camera, the actual operating environment as shown in figure, the camera installed in the end of the mechanical arm is fixed, using aruco_ros marker_id=582 calibration board

Reference of the predecessors, according to the environmental changes and write their own use. Launch file, refer to the article links as follows:
https://blog.csdn.net/weixin_40799950/article/details/82594537
https://blog.csdn.net/zhang970187013/article/details/81098175
When actual use, in turn, run the following command to start the calibration procedure
Roslaunch ur_modern_driver ur5_bringup. Launch limited:=true robot_ip:=169.254.5.89
Roslaunch ur5_moveit_config ur5_moveit_planning_execution. Launch limited:=true
Roslaunch realsense2_camera rs_rgbd. Launch
Roslaunch easy_handeye ur5_realsense_handeyecalibration. Launch
After successfully start the calibration procedure, terminal without error, according to normal process after complete calibration (17 posture won 15 available sample) obtained by matrix elements (the transition: x y z rotation: qx qy qz) form the calibration results, announced but will be published to the calibration results were observed in rviz only to find that the position of the camera (camera_link) and coordinate direction do not tally with the actual situation completely,
Using eye_on_base model calibration:
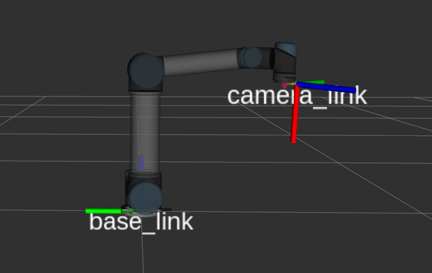
Using eye_on_hand model calibration:

Tell from the principle according to the position of the camera installed eye_on_hand mode should be used for calibration, the calibration results camera_link are wrong position and orientation, and eye_on_base model calibration results seem more like the correct results instead (though coordinate points to is wrong)
Seek help from your bosses, is really don't understand what step out of the question
CodePudding user response:
This basically see the specific code, general qr code has a problem or other problems,