Good bosses, recently in the anonymous flight control procedures, using cascade pid control, the outer ring: Angle of input and output: angular velocity, the inner ring input angular velocity, output PWM wave, for here the outer ring of the output in particular, I don't understand, how even the unit changed? Such as make a single-stage pid temperature control, input and output must have is temperature, dimension will be changed? Online information looked nor can enlighten me, personally, I think this should add a differential link between the internal and external loop controller, this Angle differential is the angular velocity of ah...
I found a picture, you can see,
CodePudding user response:
0.000000
CodePudding user response:
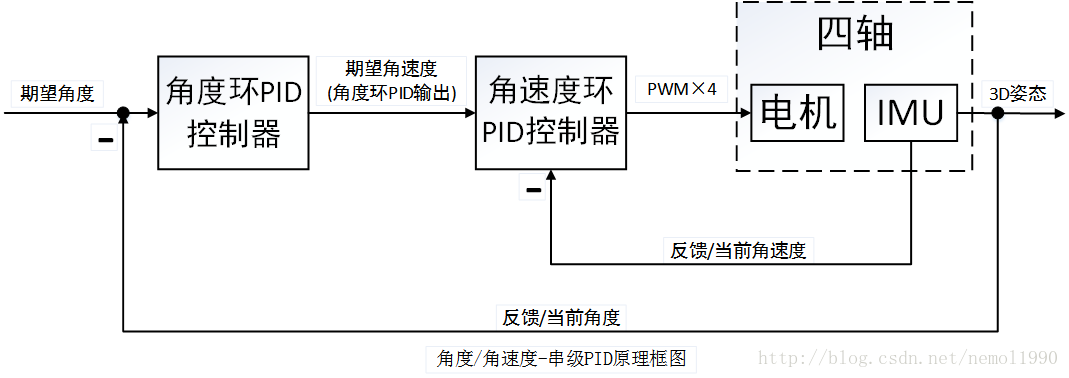
You can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity,
CodePudding user response:
refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
In the location of the PWMx4 is output PWM wave to the motor CodePudding user response:
Outer ring is the output angular velocity expectations, deviation Angle, outer ring output deviation, output value of the inner ring is outside the ring do expectations, so can achieve fast response and control to achieve the effect of very hard CodePudding user response:
reference ABCD18282 reply: 3/f Quote: refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
refer to 6th floor xuyaqi029 response: Quote: refer to the third floor ABCD18282 response: Quote: refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
refer to 7th floor worldy response: Quote: refer to the sixth floor xuyaqi029 response: Quote: refer to the third floor ABCD18282 response: Quote: refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
refer to the eighth floor xuyaqi029 response: Quote: refer to 7th floor worldy response: Quote: refer to the sixth floor xuyaqi029 response: Quote: refer to the third floor ABCD18282 response: Quote: refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
references 9 f worldy response: Quote: refer to the eighth floor xuyaqi029 response: Quote: refer to 7th floor worldy response: Quote: refer to the sixth floor xuyaqi029 response: Quote: refer to the third floor ABCD18282 response: Quote: refer to the second floor xuyaqi029 response: you can understand it, according to the expected Angle and measured current Angle to calculate the desired angular velocity, angular velocity and angular velocity of the current expectations to calculate the desired PWM drive axles, complete the feedback, the two feedback loops input parameters is a point of view, a is the angular velocity, CodePudding user response:
+  I found a picture, you can see,
I found a picture, you can see,