Reading a book - "Introduction to 3D Game Programming with Directx12 by Frank Luna", I did not understand how we got the rotation matrix from function

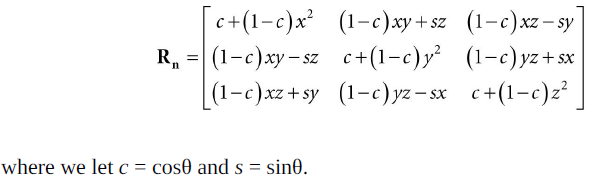
the rotation matrix is:
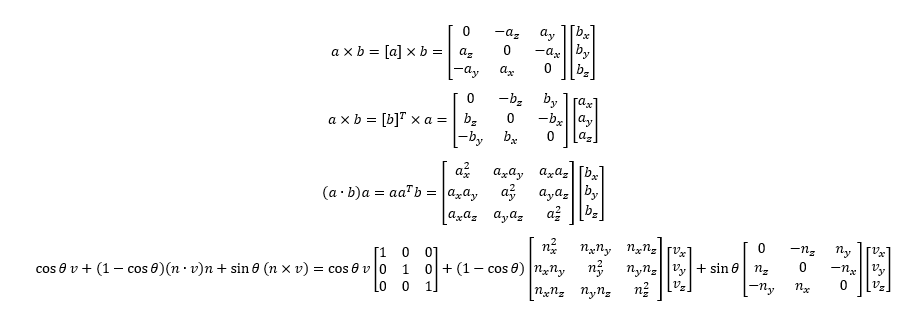
to get this matrix from this rule:
CodePudding user response:
Very nice formula.
Assuming |n|=1, the term (n.v)n is the projection of v in the direction of n, that must be unchanged.
The term v - (n.v)n is the projection of v in the plane normal to n, thus multiplied by cos(theta).
The term n x v is the vector normal to the plane containing n and v, thus multiplied by sin(theta).
CodePudding user response:
I found that cross product and projection can be represented as matrices