CodePudding user response:
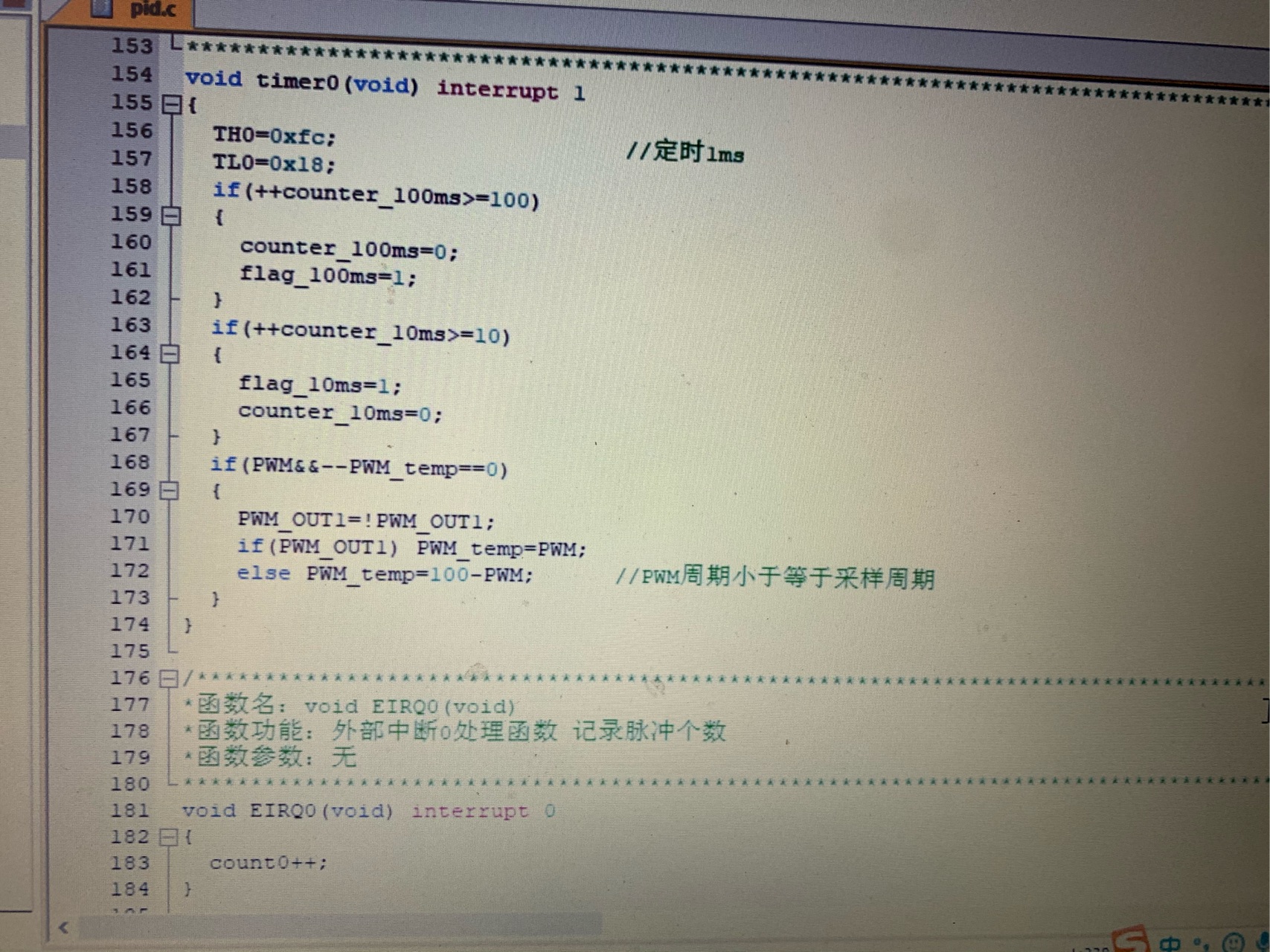
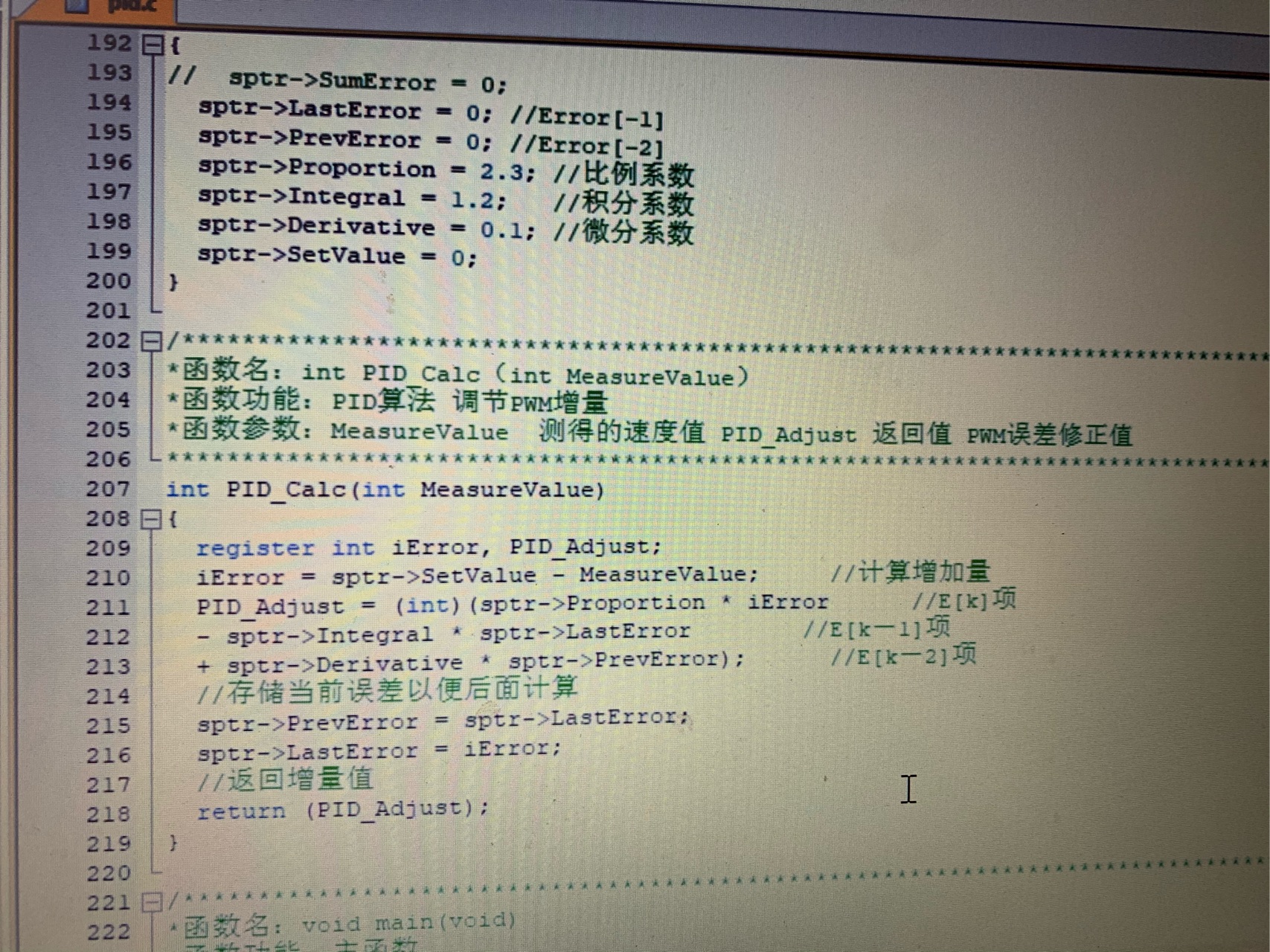
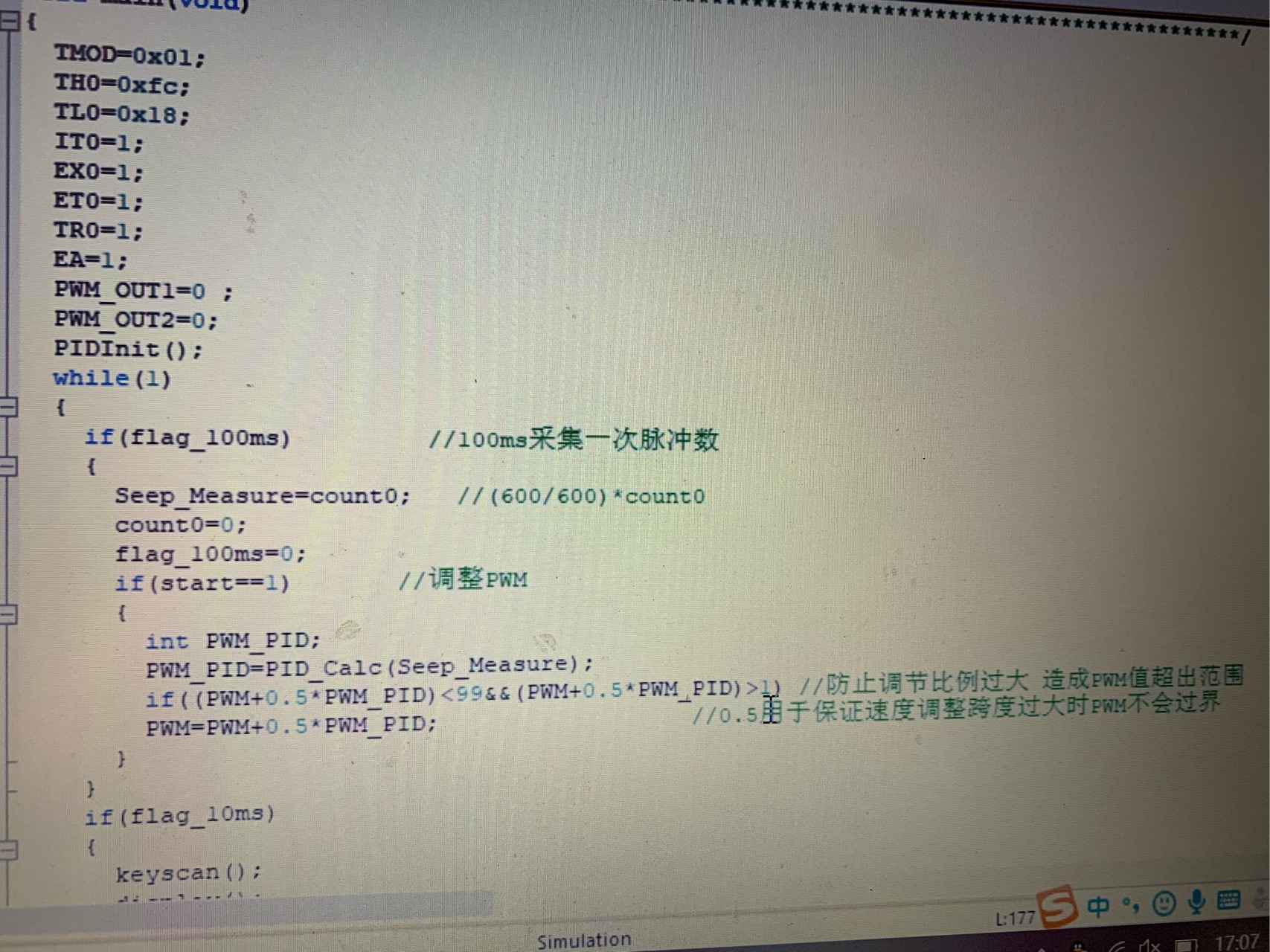
By timer flip gpio produces PWM, the program should be universal, p is the speed, I is stability d is errorCodePudding user response:
PWM_temp excuse me what does it mean, why to be 100 minus PWMCodePudding user response:
PID is proportional, integral, differential control, PWM pulse width is output, the principle is based on the current velocity (used to calculate proportion P), acceleration (used to calculate the differential D), to (I) is used for calculating integral and accumulated set speed to calculate the adjust quantity, converted into PWM (square wave duty ratio), control the turning speed of the motor (PM space ratio, the greater the faster), automatic control, the principle of PWM waveforms timer is that the two Numbers to set the timer, one is the timing cycle, a weekly during the period of transformation,