With three groups of IMU (inertial measurement unit) module based on body motion capture, improve flexibility of human-computer interaction and degrees of freedom, such as the player's actions in the game role and synchronous or mechanical arm for synchronous control, traction control, etc., to support expansion, compatible with third-party equipment data fusion,

Unique initialization algorithm, can be directly find the initial attitude deviation between different modules, can be directly using the absolute position (such as the six axis of IMU module, not nine shaft of IMU calibration module, other modules) using separate reference frame data calculation, reduce the assembly or wear requirement, the bother of repeated calibration,
Product introduction
A, hardware
A) X-ray Unit cell (attitude)
Consists of "company + MCU", independent computing their motion, output quaternions, right hand coordinate system only support the I2C communication, through the I2C (Master) control unit start/stop operation, calibration, for current stance, IAP update firmware, MCU do not encrypted, retained the SWD interface, have need can be erased or to cover the whole chip,
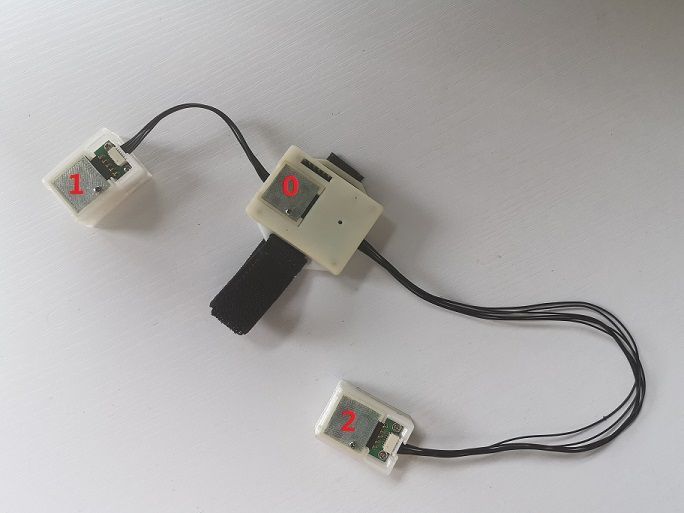
B) X - the Core (main)
Through USB or serial port and PC communication, turn a serial port can be connected to the USB serial port module or other wireless passthrough module, PC can start-stop control operation, calibration cell of all connections, IAP firmware update master and cell, accept the outcome of the operation,
Defaults to using USB power supply, reserved power interface, can according to need to welding battery,

Three attitude calculation unit, the default connection can remove below according to the demand of 1 or 2 cell, but must keep 0 cell, which calculate the unit can be replaced with catcher 1 set of late (soon), or connect conforms to the communication protocol to expand peripherals (handle),
Second, the software service
A) operation mode
X - the Core of the operation mode is divided into two kinds: "direct output unit stance" and "initialize unit profile deviation,"
1) direct output unit attitude
Default to run the model, main control real-time acquisition original posture data of each unit and sent directly to the PC, the output frequency up to 200 hz,
2) initialization module attitude deviation
In application, need to get every gesture cell under the initial position posture deviation between upper machine may at any time to send instruction to master into the operation mode, after the completion of the output calculation results and return to the default "direct output unit stance" mode, to participate in the demonstration video, PC according to each unit of real-time gesture, the initial position of the attitude deviation, combining with the inverse kinematics of the body can be realized in motion capture,
For fusion of third-party hardware, can through the I2C protocol according to the rules and master the communication, can also via USB or serial port in this mode the attitude data in real time to master, third-party hardware profile data must be right-handed coordinate system of the quaternion,
B) the firmware update
Provide the firmware update software, through the USB port to connect to PC, using software to complete the master and posture computing unit firmware updates, support firmware version update down, forced to update, if the update process accident interrupt, hardware again after electric to restore to the original version,
Three, resources
A) the design files
Provides all of the circuit board and the shell of the CAD file, if necessary, can be applied for the hardware schematic diagram, PCB files, BOM table;
Provide engineering cases involve the CAD file of mechanical arm,
B) engineering case and source
To provide Processing, Unity, engineering case and the source code under the ROS, indefinite increase and update the engineering case and source,
C) information
Provide hardware specifications, protocols, operating instructions;
Provide about company introduction, posture fusion algorithm etc;
Provide introductory about motion capture, reverse kinematic data;
In Unity and ROS rigging and synchronous mechanical arm/traction control tutorials;
Provided under the Unity and ROS import mechanical arm model or modeling tutorial, the guidance of the
4, shipping list
The official price 380 yuan/set can taobao search minimum dynamic capture module
X-ray Unit 3 X
X - Core X 1
X-ray Unit connecting X 2
Micro USB cable x 1
Velcro elastic bandages x 3
Note: do not contain batteries; Product shell for 3 d printing to full term,
Minimum motion capture system (demo) - technology - hd complete watch the original video online - youku https://v.youku.com/v_show/id_XNDI4MzcyNzgyNA==.html? SPM=a2h0k. 11417342. Soresults. Dposter