During my graduate research of ant colony algorithm and its application in robot path planning,
While have a class this code is to draw a graph to compare different kinds of ant colony algorithm, the main package ACS, MMAS, EAS, such as the classical ant colony algorithm, finally also includes himself another algorithm is put forward,
This code has been successfully applied to the software copyright (and therefore please note: the
this code has the copyright)
Software environment is mainly (2016 b and above) under MATLAB GUI,
Main functions are:
1, the comparison of different algorithms in different operation under grid environment, (grid environment to design)
2, observe the result of the experiment, including iterative curve and many times the average of the operation, can be directly observed the robustness of algorithm itself,
3, the code is modular design, can also learn a variety of ant colony algorithm,
Download address: https://download.csdn.net/download/qq_27261889/10735012
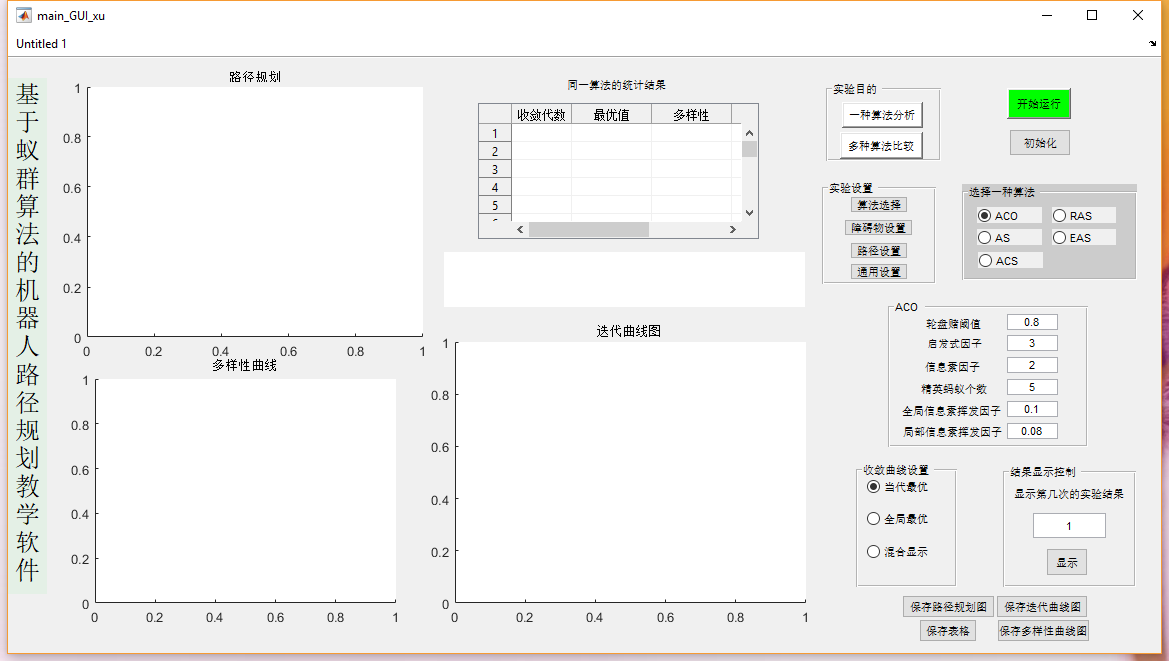
Use the screenshot is as follows:
CodePudding user response:
CodePudding user response:
Here is the existing grid environment
CodePudding user response:
This is all the code
CodePudding user response:
Excuse me so much of your code, which is the main function, and want to grid path planning figure code as a result, the saw no main function like a circle
CodePudding user response:
The initial interface
Operation interface
reference 4 floor weixin_41465310 response: excuse me so much of your code, which is the main function, and want to grid path planning result figure code, the saw a circle are not the main function like CodePudding user response:
Thank you very much! Useful, thanks for your sharing and fast answer! Gratitude! CodePudding user response:
I was supposed to preach my documentation, but I can't find it, refer to 6th floor weixin_41465310 response: thank you very much! Useful, thanks for your sharing and fast answer! Gratitude! CodePudding user response:
refer to 6th floor weixin_41465310 response: thank you very much! Useful, thanks for your sharing and fast answer! Gratitude! CodePudding user response:
Main_gui is the main function, CodePudding user response:
In addition it convenient for you leave email? I try to refer to the result of your algorithm to further communication, and the copyright problem, CodePudding user response:
references 9 f weixin_41465310 response: main_gui is the main function, [email protected] CodePudding user response:
Would like to ask you to think on the robot path planning, ant colony algorithm compared with traditional algorithm, such as A * algorithm, the advantage of the Dijkstra algorithm in where? CodePudding user response:
refer to 12 floor weixin_41465310 reply: want to excuse me, can you tell me what you think on the robot path planning, ant colony algorithm compared with traditional algorithm, such as A * algorithm, the advantage of the Dijkstra algorithm in where? CodePudding user response:
Why when I was running, the main function of basic error CodePudding user response:
On the 14th floor weixin_43906103 reference response: why when I was running, the main function is basic error CodePudding user response:
Hello, when I was running, click on the GUI of each button is an error, and interface a bit, I'm matlab2017a CodePudding user response:
I know what is going on, I perform file is wrong, should be performed. M, I performed. FIG,,,,, disturb the building Lord, thank you for your share for everybody to learn CodePudding user response:
Hello, I want to, I would like to ask about your software after the operation of the path roadmap, iterative graph when the save why error can not save? CodePudding user response:
nullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnullnull