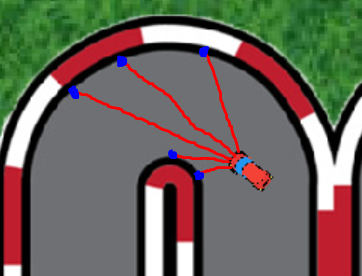
I'm trying to create sensors for a car to keep track of the distances from the car to the borders of the track. My goal is to have 5 sensors (see image below) and use them to train a machine learning algorithm.
But I can't figure out a way to calculate these distances. For now, I just need a sample of code and a logical explanation of how to implement this with PyGame. But a mathematical and geometrical explanation would be really nice as well for further reading. I'm using 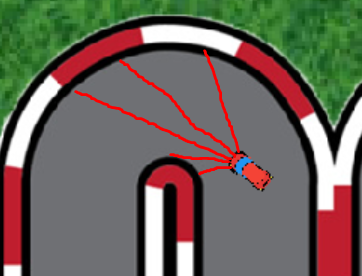
I've tried different approaches to this problem, but for now, my biggest problem is how to get the position of the blue dots:
--- Edit from the feedback ------
I added a new paragraph to better explain the problem. This way I hope it is clearer why this problem is different from those said to be related to it. The other problem we have the desired final position (mouse or enemy) in this one we have to figure out which point is the one we are going to use to create the line, and this is my issue.
My GitHub repo of the project

As we can see when the bullet hits the wall we can create a line that connects the point to the car. This is not the best solution, as it takes time for the bullet to hit the wall and in the meantime, the car is "blind".
As Rabbid76 commented, using raycasting may be the solution I was looking for.
Code for reference:
Sensor Bullet class
class SensorBullet:
def __init__(self, car, base_angle, vel, color):
self.x = car.x CAR_WIDTH/2
self.y = car.y CAR_HEIGHT/2
self.angle = car.angle
self.base_angle = base_angle
self.vel = vel
self.color = color
self.img = pygame.Surface((4, 4))
self.fired = False
self.hit = False
self.last_poi = None
def draw(self, win):
pygame.draw.circle(win, self.color, (self.x, self.y), 2)
def fire(self, car):
self.angle = car.angle self.base_angle
self.x = car.x CAR_WIDTH/2
self.y = car.y CAR_HEIGHT/2
self.fired = True
self.hit = False
def move(self):
if(self.fired):
radians = math.radians(self.angle)
vertical = math.cos(radians) * self.vel
horizontal = math.sin(radians) * self.vel
self.y -= vertical
self.x -= horizontal
def collide(self, x=0, y=0):
bullet_mask = pygame.mask.from_surface(self.img)
offset = (int(self.x - x), int(self.y - y))
poi = TRACK_BORDER_MASK.overlap(bullet_mask, offset)
if poi:
self.fired = False
self.hit = True
self.last_poi = poi
return poi
def draw_line(self, win, car):
if self.hit:
pygame.draw.line(win, self.color, (car.x CAR_WIDTH/2, car.y CAR_HEIGHT/2), (self.x, self.y), 1)
pygame.display.update()
def get_distance_from_poi(self, car):
if self.last_poi is None:
return -1
return math.sqrt((car.x - self.last_poi[0])**2 (car.y - self.last_poi[1])**2)
Methods the car must perform to use the sensor
# Inside car's __init__ method
self.sensors = [SensorBullet(self, 25, 12, (100, 0, 255)), SensorBullet(self, 10, 12, (200, 0, 255)), SensorBullet(self, 0, 12, (0, 255, 0)), SensorBullet(self, -10, 12, (0, 0, 255)), SensorBullet(self, -25, 12, (0, 0, 255))]
# ------
# Cars methods
def fireSensors(self):
for bullet in self.sensors:
bullet.fire(self)
def sensorControl(self):
#print(contains(self.sensors, lambda x: x.hit))
for bullet in self.sensors:
if not bullet.fired:
bullet.fire(self)
for bullet in self.sensors:
bullet.move()
def get_distance_array(self):
return [bullet.get_distance_from_poi(self) for bullet in self.sensors]