CodePudding user response:
Everybody is good! I now use matlab tools to do a monocular camera calibration, the calibration error every time I at about 0.3 to 0.4 pixels, I found the location of the calibration plate and the size of the distance from the camera, the results of calibration and light effect particularly big, so1. How to put the calibration board? What is the fixed order?
2. There is light conditions to what is better,
3. The calibration board should take much in the picture?
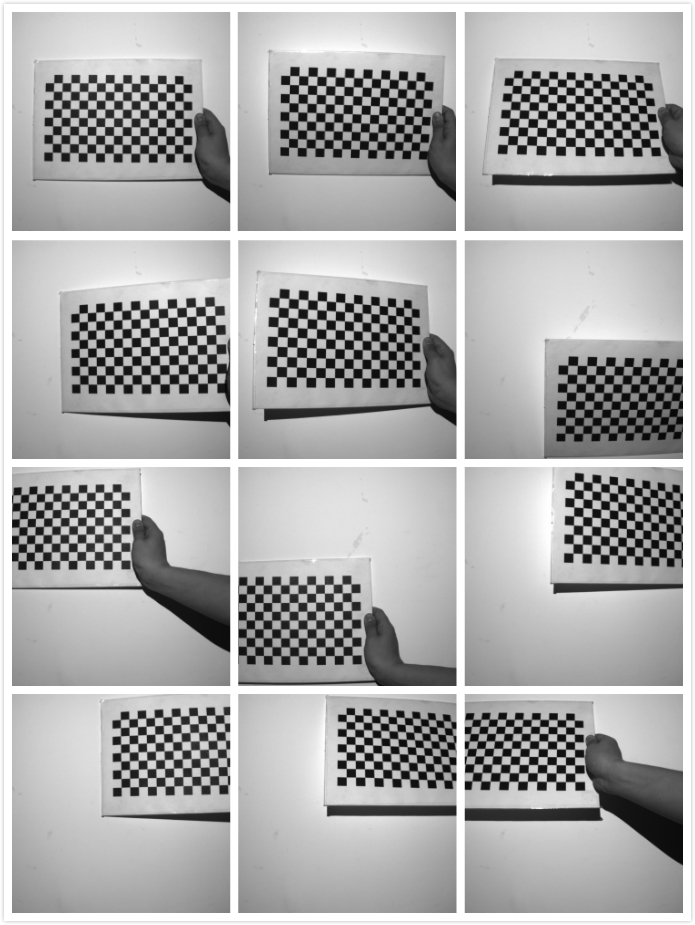
Here is a picture I shot the calibration, I put the order of the image is divided into four quadrants, each quadrant including overlooking look left right in the face, I shoot calibration plate of the area is too small in the picture?
CodePudding user response:
CodePudding user response:
1 calibration plate full of the entire field of vision as far as possible also to ensure that a quarter of vision (minimum)2 in all directions, near and far, and rotated by figure
3 brightness around 150 on average, easy to find
CodePudding user response:
How do feel your paper not flat, there are ups and downs, the camera focus is not to clear, a little fuzzyCodePudding user response:
From zhang algorithm is one of the biggest problems, ensure that the Angle between the two samples to greatly greatly big,You this a few photos I can't see "tilt is very big,"
Another problem algorithm,
Sampling to uniform, four corners must swing,
Another is the calibration board is a bit rough - and you -
CodePudding user response:
Hello, I am just learning this part, 1, calibration plate to flat, 2, and the coke set before filming, 3, and the calibration plate in images are as far as possible, you have to share is quite big, should do,CodePudding user response:
Calibration plate is flat and distribution in view of different angles, different position, the calibration result will be better! The more accurate the more sample calibration positionCodePudding user response:
Calibration plate to flat, checkerboard to larger, accounting for more than 1/2 view;CodePudding user response:
1. The version of the camera calibration is put:(1) not collinear: multiple angles, different photos best Angle change is more obvious, because the motion is relative, can hold the calibration board, taken in different angles,
No particular order,
(2) the light conditions without special requirement, just make sure the image is clear, corner detection can be in a better way,
(3) the best each image contains the calibration board, because building image and Angle of points on the calibration plate angular point corresponding relation is algorithm, matlab didn't get the complete data can not determine the corresponding relation between the angular point,
CodePudding user response:
Excuse me pixel error from which