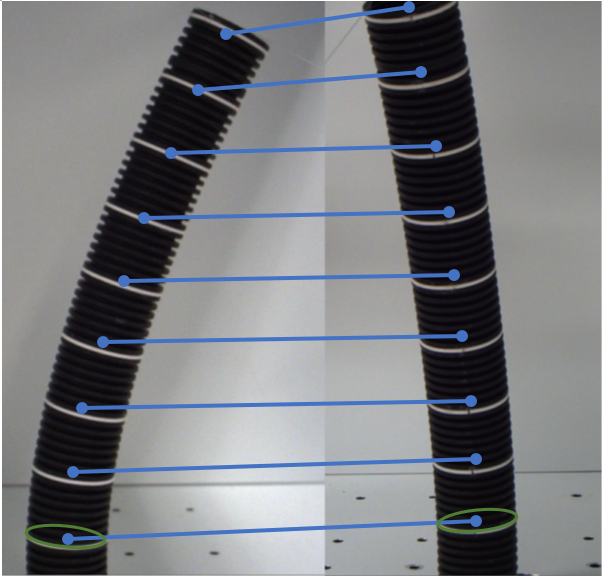
I have a markered robot with circular markers and two images from different perspective as shown: (Circular white rings are the markers)


I want to match the markers in the two images, by matching I mean the bottommost marker of 1st image should be treated as correspondence point of bottom most marker of 2nd image and so on. The finger-like robot given in the image can bend in any direction given in space (can also bend in a U-like manner). If it helps, the camera geometry is fixed and known beforehand.
I am lost, as simple correspondence algorithm would not work, since the perspectives are very different. How should I go about matching the two images?
CodePudding user response:
You can start like this:
- You know the position of the mounting point on the base panel for each perspective.
- You know the positions of the white rings for each perspective as discussed