How can i discretize the following nonlinear system. Im using Matlab and Casadi for Model Predictive Control. The Constant C is betwenn 0 and 1.
dx/dt = C * x/(x^2 1)
Thank you for your time and Help.
CodePudding user response:
If you are just looking to build it from blocks, something like this should work:
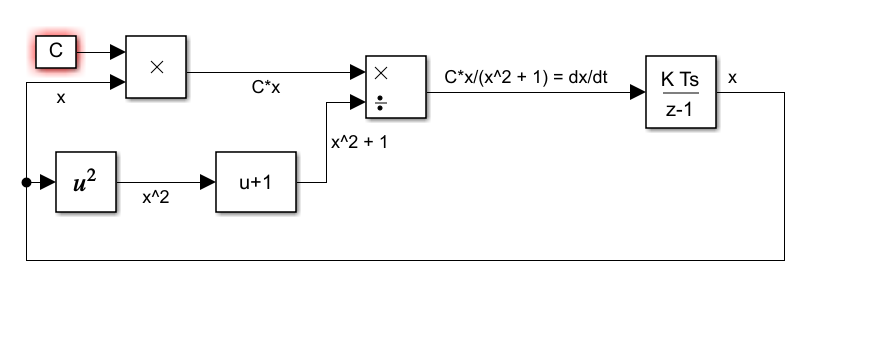
You basically need to invert the formula to:
x = int(C * x/(x^2 1))
Everything to the right of the equal sign then feeds the input to the integrator and the output of the integrator becomes x.
CodePudding user response:
Well if you want to use mfile to discretize a differential equation, there are a lot of methods such as simple Euler, Runge-Kutta, and so on. Let me say how to use Euler method. based on the differential definition:
dx/dt = (x(i 1) - x(i))/dt
here i is the discretization index and dt is sample time (typically 0.01). If I have to use your equation:
(x(i 1) - x(i))/dt = C*x(i)/(x(i)^2 1)
after simplification:
x(i 1) = x(i) dt*(C*x(i)/(x(i)^2 1))
this is your discretized model. In matlab, just use the following code:
C = 0.5;
N = 100;
x(1) = 1; % initial condition
dt = 0.01;
i = 1;
for i = 1:N
x(i 1) = x(i) dt*(C*x(i)/(x(i)^2 1));
end