- Context: I work with satellite images that I filter to transform to arrays of 1s and 0s, based on the presence of snow (0 for snow, 1 for non-snow). My code creates an array of
NaNs, searches for each snow pixel if at least one of the neighbor is non-snow (in a cross patter, cells painted red in the picture below), and inputs "1" in thenanarray. Once I do that for my entire matrix I end up with lines where a line cell = 1, rest are nans.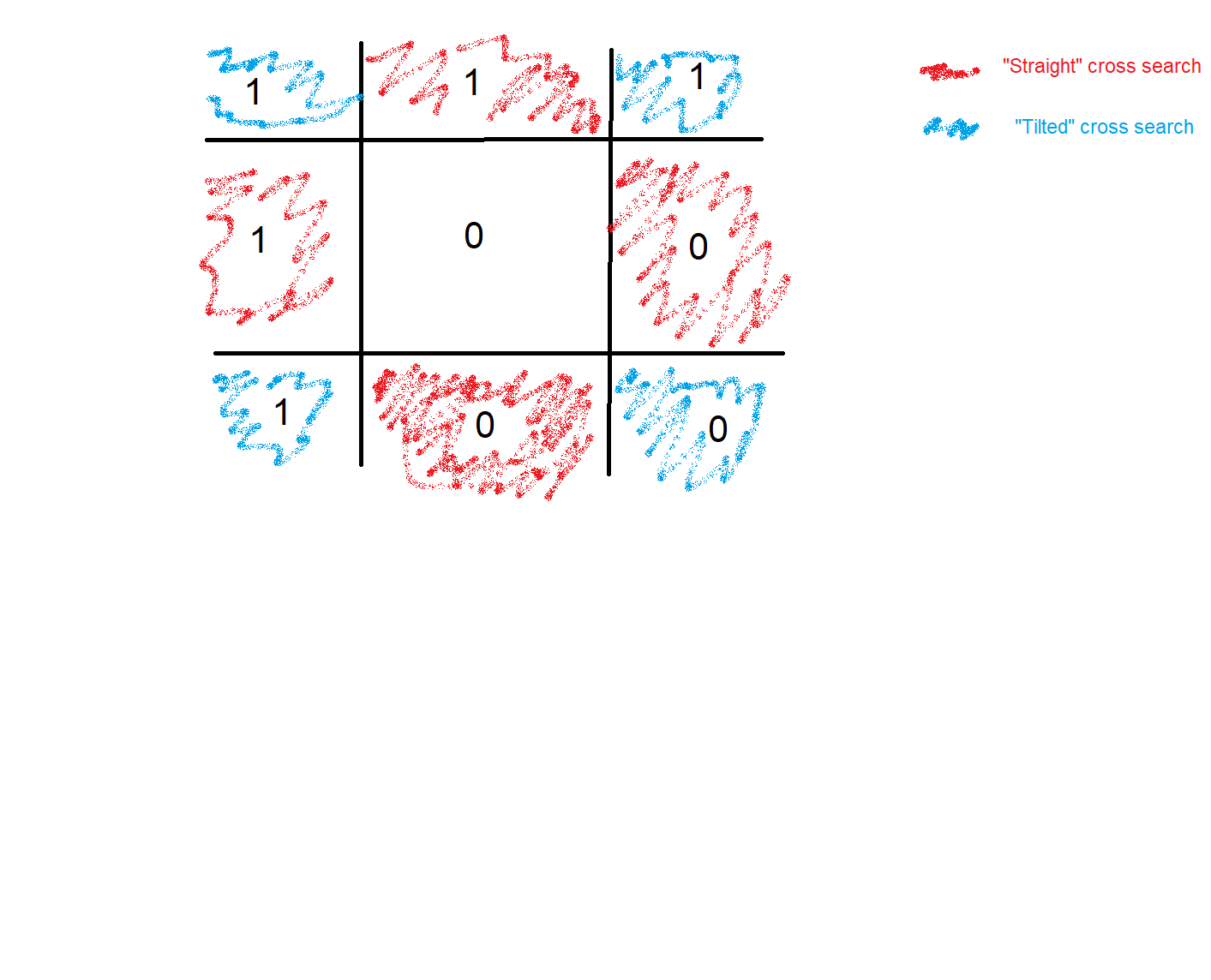
- Problem: I end up with a matrix with several lines inside. What I count as a line is at least two cell equal to 1, in the direct neighborhoods. Meaning that for each line cell, if any of the 8 surrounding cells has a
1inside, they are forming a line (figure below shows the boundary between snow (purple) and non-snow cells (yellow).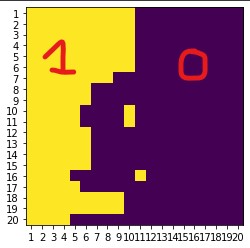
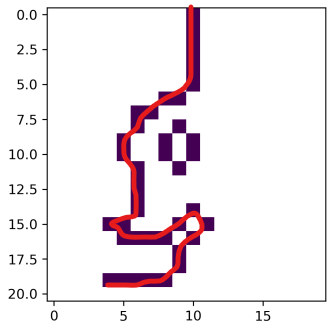
- What I have: I wrote an algorithm that counts the amount of cells in a line and records its starting/ending cells (see figure below, amount of cells through which the red line passes) so I can filter my lines by size at the end.
- What I want: my code works but is extremely slow. I coded it the best way I could but O was wondering if there was a way to be more efficient ?
Ps: Sorry about the clanky explanation, it is hard for me to explain clearly. The code will show you how it works, and the figures generated should make it clearer.
Some code to generate a "lines" matrix:
import numpy as np
import rasterio as rio
import numpy as np
import glob
import matplotlib.pyplot as plt
import pandas as pd
# Create an array with a line of 1s (not a straight line)
array = np.array([[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., 1., np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., 1., np.nan, np.nan, np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, 1., np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, 1., np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, 1., np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, 1., np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, np.nan, np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, np.nan, np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, 1., 1., np.nan, np.nan, np.nan, 1., np.nan, 1., np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, 1., 1., 1., 1., np.nan, 1., np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, 1., np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, 1., 1., 1., 1., 1., np.nan, np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan],
[np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan,
np.nan, np.nan, np.nan, np.nan, np.nan, np.nan, np.nan]])
array = array.reshape((1,array.shape[0],array.shape[1]))
# Create a dataframe that will store the start and endpoint of the lines, as well as their length
templines = pd.DataFrame(columns=['i','Rstart','Cstart','Rend','Cend','Length'])
# Create a 2nd dataframe that will be used to snip together the lines that end and start at the same point
lines = templines.copy()
# Create the straight and tilted cross search patterns
crossr = [-1, 0, 0, 1]
crossc = [0, -1, 1, 0]
xr = [-1, -1, 1, 1]
xc = [-1, 1, -1, 1]
# Constrain our search to an Area of Interest (AOI), useful when dealing with bigger arrays.
r1 = 0
r2 = array.shape[1]
c1 = 0
c2 = array.shape[2]
# Initialize our search indexes
i = 0
j = r1
k = c1
# Create an empty array which will be filled with 1s everytime a pixel is on the line (ensures our programe is replicating the lines' paths)
test = np.zeros((r2-r1, c2-c1))
# Start the search
while i < array.shape[0]:
j = r1
while j < r2:
k = c1
while k < c2:
# If we find a boundary pixel, start searching its neighbors' values
if array[i, j, k] == 1:
# We initialize a counter. If exactly 2 cells in the square centered on our cell are 1s, we are at the start of a line
counter = 0
for c in range(j-1, j 2):
for cc in range(k-1, k 2):
if array[i, c, cc] == 1:
counter =1
# If the pixel is the start of a line (meaning that on a 3x3 cells matrix, 2 cells are equal to 1)
if counter == 2:
# Gather the indexes of the next line cell
# Vertical Cross search
for c in range(0, len(crossr)):
if array[i,j crossr[c], k crossc[c]] == 1:
jj = j crossr[c]
kk = k crossc[c]
test[jj-r1, kk-c1] = 1
break
# Tilted cross search
elif array[i,j xr[c], k xc[c]] == 1:
jj = j xr[c]
kk = k xc[c]
test[jj-r1, kk-c1] = 1
break
# Save the indexes of the previous cell in line
source = [j,k]
source = np.vstack((source,[jj,kk]))
linelength = 1
# When we find an extremity of a line, we "travel along" the line by finding the next neighboring cell
while jj > r1 and jj < r2:
while kk > c1 and kk < c2:
flag = 0
for c in range(0, len(crossr)):
# If we find a cell = 1, with different indexes than the previous searching cell
if array[i,jj crossr[c], kk crossc[c]] == 1 and [jj crossr[c],kk crossc[c]] not in source.tolist():
source = np.vstack((source,[jj,kk]))
jj = jj crossr[c]
kk = kk crossc[c]
test[jj-r1, kk-c1] = 1
linelength = 1
flag = 1
break
# Tilted cross search
elif array[i,jj xr[c], kk xc[c]] == 1 and [jj xr[c],kk xc[c]] not in source.tolist():
source = np.vstack((source,[jj,kk]))
jj = jj xr[c]
kk = kk xc[c]
test[jj-r1, kk-c1] = 1
linelength = 1
flag = 1
break
# If there is no other cell on the line, flag is 0 so we stop the search
# We gather the information of that line in our dataframe
if flag == 0:
print('End of Line')
templines.loc[len(templines.index)] = [i, j, k, jj, kk, linelength]
break
if flag == 0:
break
if flag == 0:
break
k = 1
j = 1
i = 1
# We snip together lines that are ending and starting at the same point
for m in range(len(templines)):
for n in range(m 1, len(templines)):
if templines.Rend[m] == templines.Rstart[n] and templines.Cend[m] == templines.Cstart[n]:
lines.loc[len(lines.index)] = [templines.i[m], templines.Rstart[m], templines.Cstart[m], templines.Rend[n],
templines.Cend[n], templines.Length[m] templines.Length[n]]
# We check that the program "traveled" along the line
plt.figure()
plt.imshow(array[0,:,:])
plt.figure()
plt.imshow(test[:,:])
CodePudding user response:
There's an idea in image processing, which is find to a group of pixels which is contiguous, or a connected component. Once you have this connected component, you can find the size of the component, and filter out small ones.
There's a fast way of doing this in the scipy package, called 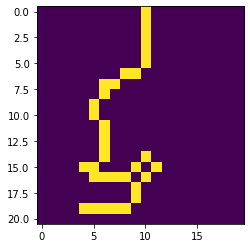
This solution is not exactly the thing you asked for - but it's similar enough that it may work for your application.