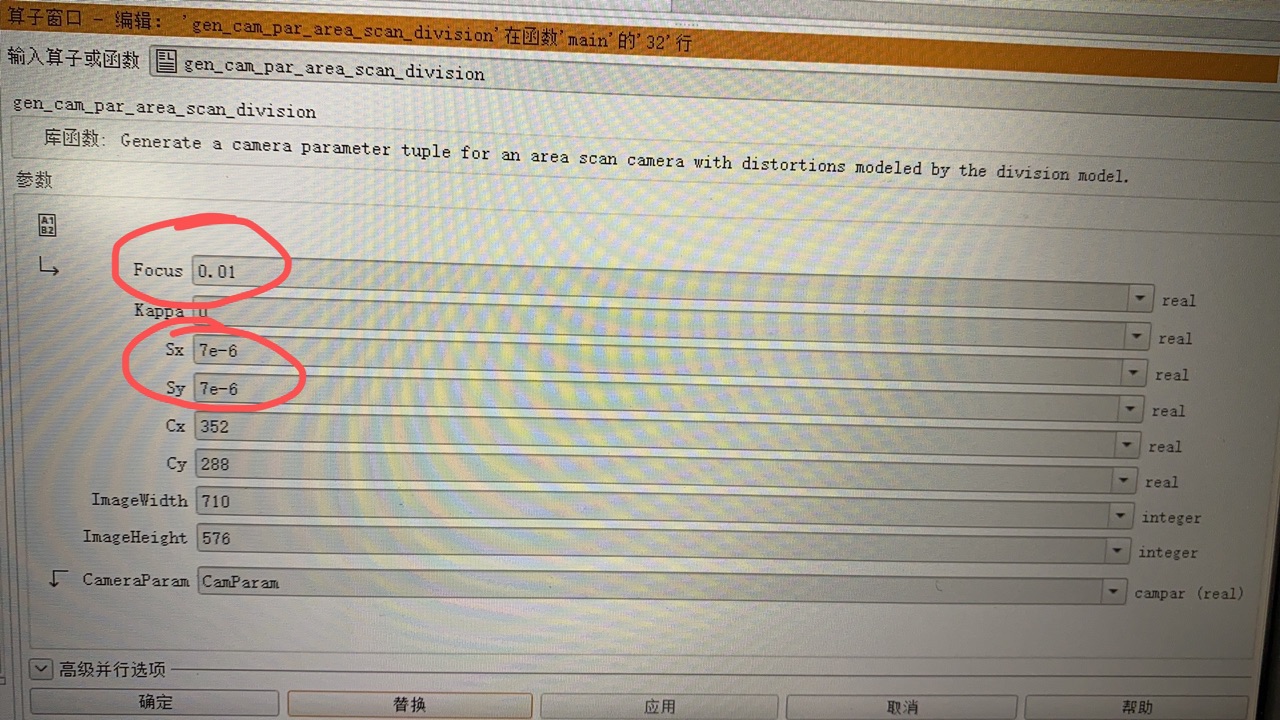
I want to use halcon read 3 d point cloud data and display the 3 d map, using the visualize_object_model_3d operator, but the operator need to enter inside the camera made in RMB (focal length, like size, etc.), I use a line laser to get point cloud data of LMI, the camera parameters LMI there are secret, consult this case how to operate? Or other operators can use halcon have?