I have two points, one represents the cursor(a cube) and another one represents the position of the Camera.
Now to find out which face the camera is facing I have done something like this
glm::vec3 direction = glm::normalize(cursorPos - cameraPos);
float angle_x, angle_y, angle_z;
angle_x = glm::dot(direction, vec3(1.0f, 0.0f, 0.0f)); // in terms of cosine
angle_x = glm::acos(angle_x); // in terms of radians
angle_x = glm::degrees(angle_x); // in terms of degrees
angle_y = glm::dot(direction, vec3(0.0f, 1.0f, 0.0f)); // in terms of cosine
angle_y = glm::acos(angle_y); // in terms of radians
angle_y = glm::degrees(angle_y); // in terms of degrees
angle_z = glm::dot(direction, vec3(0.0f, 0.0f, 1.0f)); // in terms of cosine
angle_z = glm::acos(angle_z); // in terms of radians
angle_z = glm::degrees(angle_z); // in terms of degrees
bool x_45 = angle_x <= 45;
bool x_135 = angle_x > 135;
bool y_45 = angle_y <= 45;
bool y_135 = angle_y > 135;
bool z_45 = angle_z <= 45;
bool z_135 = angle_z > 135;
if (x_45)
{
std::cout << "facing left face\n";
}
else if (x_135)
{
std::cout << "facing right face\n";
}
else if (y_45)
{
std::cout << "facing up face\n";
}
else if (y_135)
{
std::cout << "facing down face\n";
}
else if (z_45)
{
std::cout << "facing front face\n";
}
else if (z_135)
{
std::cout << "facing back face\n";
}
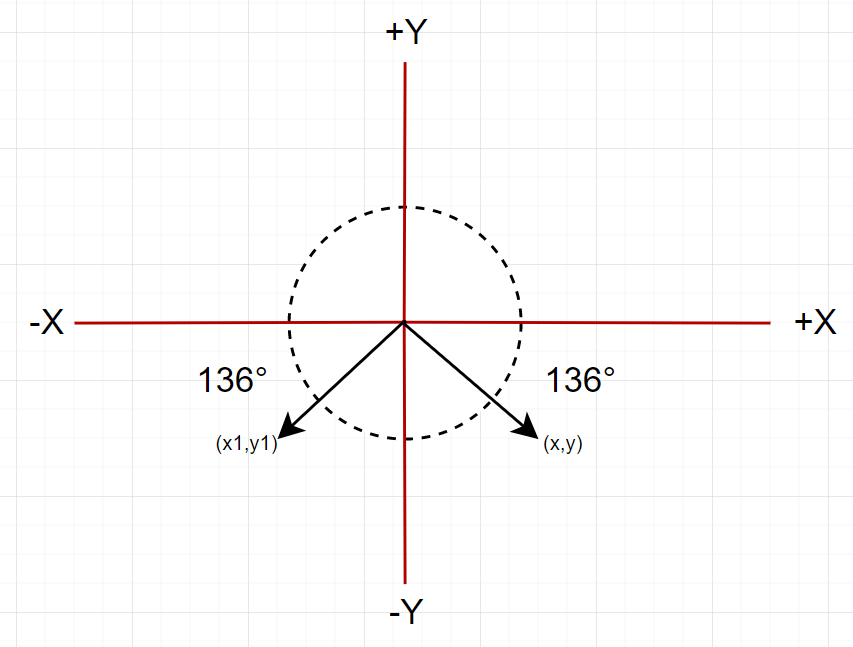
Why do angles that are getting calculated only in the range (0, 180) with the axis?
It's leading to calculated angles as:
"Angle with x: 62.9398 Angle with y: 47.5 Angle with z: 125.464"
Which should only be possible if the calculated angle range is in (0, 360)?
What is happening right now( I assume) is that it's getting calculated without the consideration of another axis, as shown in the below image.
I am sure this is the most brute way to do this, if anyone has other solution please tell. --Maybe something like converting that normalized vector in its quaternion rotation represtation and getting euler angels out of it?
CodePudding user response:
You made this code hard to understand and maintain. Here is method which do not need large mind power.
Just 6 vectors defining directions and trying find one which is closest to direction:
Facing findOrientation(glm::vec3 direction)
{
struct FacingNormalizations {
Facing facing;
glm::vec3 v;
};
constexpr std::array facings {
FacingNormalizations { Facing::back, { 0, 0, 1 } },
FacingNormalizations { Facing::right, { 1, 0, 0 } },
FacingNormalizations { Facing::up, { 0, 1, 0 } },
FacingNormalizations { Facing::front, { 0, 0, -1 } },
FacingNormalizations { Facing::left, { -1, 0, 0 } },
FacingNormalizations { Facing::down, { 0, -1, 0 } },
};
auto r = std::max_element(facings.begin(), facings.end(),
[direction](const auto& a, const auto& b) {
return dot(direction, a.v) < dot(direction, b.v);
});
return r->facing;
}
https://godbolt.org/z/nqjGbMK54
Note if you need to add some extra direction it is easy. If you like to make some direction more privileged, you should just make respective vector longer.